
Uln2003a схема включения arduino
Arduino, шаговый двигатель 28-BYJ48 и драйвер ULN2003
Шаговый двигатель — это мотор, который управляется несколькими электромагнитными катушками.
На центральном валу — роторе — расположены магниты. В зависимости от от того, есть ток на катушках, которые находятся вокруг вала, или нет, создаются магнитные поля, которые притягивают или отталкивают магниты на роторе. В результате вал шагового двигателя вращается.
Подобная конструкция позволяет реализовать очень точное управление углом поворота ротора шагового двигателя относительно катушек — статора. Можно выделить два основных типа шаговых моторов: униполярные и биполярные шаговые двигатели.
В данной статье мы рассмотрим работу униполярного шагового двигателя 28-BYJ48 с драйвером ULN2003.


Униполярные шаговые двигатели имеют пять или шесть контактов для подключения и четыре электромагнитные катушки в корпусе (если быть более точными, то две катушки, разделенные на четыре). Центральные контакты катушек соединены вместе и используются для подачи питания на двигатель. Эти шаговые моторы называются униполярными, потому-что питание всегда подается на один из этих полюсов.
Спецификация и драйвер шагового двигателя
Существуют разные модели драйверов (контроллеров) шаговых двигателей. Среди них можно выделить самые популярные в DIY разработках на базе Arduino: L293, ULN2003, A3967SLB.
Как правило, шаговый двигатель 28-BYJ48 используют в паре с драйвером ULN2003.
Спецификацию шагового двигателя 28-BYJ48 на английском языке вы можете скачать здесь. Краткие выдержки основных технических характеристик приведены ниже:
- Напряжение питания: 5 В (постоянный ток);
- Количество фаз: 4;
- Количество шагов: 64;
- Угол поврота на один шаг: 5.625 градуса
- Частота: 100 Герц;
- Частота холостого хода по часовой стрелке: > 600 Герц;
- Частота холостого хода против часовой стрелки: > 1000 Герц;
- Крутящий момент > 34.3 миллиньютон на метр;
- Сопротивление вращению: 600-1200 грамм на сантиметр;
- Класс элетробезопасности: A;
Внешний вид и схемы подключения ULN2003 приведены на изображениях ниже




Примечание. Если вы захотите использовать плату L293 вместо ULN2003, красный контакт подключать не надо.

Необходимые компоненты
- Микроконтроллер Arduino.
- Шаговый двигатель BYJ48 5В.
- Драйвер шагового двигателя ULN2003.
- Коннекторы.
- Источник питания 5v — необязательно.
Скетч для Arduino
В Arduino IDE есть встроенная библиотека для управления шаговыми двигателями. После подключения шагового двигателя, ULN2003 и Arduino, вы можете загрузить скетч из категории Examples и .
На этом этапе возникают определенные нюансы:
У этого двигателя передаточное отношение 1:64, а угол поворота 5.625, то есть у него 4096 шагов.
Шаг = Количество шагов на один поворот * передаточное отношение.
Шаги= (360/5.625)*64″Передаточное отношение» = 64 * 64 =4096. Это значение надо учесть в скетче Arduino.
А вот угол поворота для шаговых двигателей от adafruit равен 7.5 градусов, а передаточное отношение 1:16, так что количество шагов за 1 полный оборот вала равно:
Шаги за один оборот = 360 / 7.5 = 48.
Шаги = 48 * 16 = 768
То есть, это значение меняется в зависимости от двигателя, который вы используете. Поэтому проверяйте даташит для калибровки и корректной работы вашего шагового двигателя.
Модуль драйвера шагового двигателя ULN2003 подключается к Arduino контактами IN1 — IN4 к D8 — D11 соответственно.
Для подачи питания на ваш мотор, рекомендуется использовать внешний источник питания 5V с силой тока 500mA минимум. Не питайте двигатель непосредственно от контакта 5V на плате Arduino.
Проблема направления вращения в библиотеке и как ее исправить
Когда вы загрузите скетч на Arduino, шаговый двигатель будет вращаться в одном направлении с помощью функции:
То есть, вам надо указать в параметрах количество шагов для поворота ротора вала.
По идее, указав положительное или отрицательное значение, вы можете управлять направлением вращения. Если ваш шаговый двигать так и работает, то можете не читать дальше.
Но если шаговый двигатель вращается в том же направлении вне зависимости от знака, то надо внести изменения в библиотеку Arduino. В следующем разделе приведен код, используя который вы можете управлять направлением вращения.
Измененный код для Arduino
Окончательная версия скетча для шагового двигателя:
/* Скетч для шагового двигателя BYJ48
Схема подключения: IN1 >> D8 IN2 >> D9 IN3 >> D10 IN4 >> D11 VCC . 5V.
Лучше использовать внешний источник питания Gnd
Автор кода: Mohannad Rawashdeh
Детали на русском языке: /arduino-shagovii-motor-28-BYJ48-draiver-ULN2003
Англоязычный вариант: http://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 */
boolean Direction = true;
unsigned long last_time;
unsigned long currentMillis ;
void stepper(int xw)<
StepperMotor::StepperMotor(int In1, int In2, int In3, int In4)<
// Записываем номера пинов в массив inputPins
// Проходим в цикле по массиву inputPins, устанавливая каждый из них в режим Output
for (int inputCount = 0; inputCount inputPins[inputCount], OUTPUT);
void StepperMotor::setStepDuration(int duration)<
void StepperMotor::step(int noOfSteps)<
* в данном 2D массиве хранится последовательность, которая
* используется для поворота. В строках хранится шаг,
* а в столбцах — текущий input пин
int factor = abs(noOfSteps) / noOfSteps; // Если noOfSteps со знаком +, factor = 1. Если noOfSteps со знаком -, factor = -1
noOfSteps = abs(noOfSteps); // Если noOfSteps был отрицательным, делаем его позитивным для дальнейших операций
* В цикле ниже обрабатываем массив sequence
* указанное количество раз
for(int sequenceNum = 0; sequenceNum inputPins[inputCount], sequence[(int)(3.5-(3.5*factor)+(factor*position))][inputCount]);
Давайте посмотрим на конструктор на строчке 4. Мы начинаем с того, что добавляем выбранные пользователем пины в массив inputinputPins в строчках 6-9. В результате мы получаем простой и интуитивно понятный доступ к номерам пинов в дальнейшем коде.
В 12 строке мы пробегаемся по массиву inputinputPins и устанавливаем для каждого режим OUTPUT.
В 15 строке мы устанавливаем длительность шага по-умолчанию равной 15 мс.
В 18 строчке у нас функция-сеттер для установки длительности шага.
Теперь давайте рассмотрим метод step. Этот метод дает возможность шаговому двигателю делать переданное методу количество шагов.
В 28 строчке мы объявляем частоту вращения с использованием 2-х мерного массива. Строки представляют шаг, столбцы — выходящие пины.
В 37 строчке рассчитывается значение переменной factor, которое равно +1 или -1 в зависимости от знака, который мы передали при указании шагов. Это значение используется для определения направления перебора массива, то есть, в результате, для изменения направления вращения.
В 38 строчке мы присваем noOfSteps переменной позитивное значение.
В 44 строке мы запускаем цикл, который будет отрабатывать для каждой последовательности оборотов, то есть в начале каждого 8-го щага.
В 45 строке мы запускаем второй цикл, который пробегается по строкам в нашем массиве.
В 46 строчке мы устанавливаем задержку в соответствии со спецификацией.
В 47 строке мы пробегаемся по номерам пинов.
В 48 строке мы передаем цифровой сигнал на текущий номер пина.
Если переменная factor отрицательная, в 48-й строчке кода строки массива обрабатываются в противоположном порядке, то есть с низу вверх.
Доступ к библиотеке для шагового двигателя из Arduino IDE
Нам осталось добавить созданные файлы в папку библиотек Arduino IDE и мы сможем импортировать ее в любой наш проект.
Перейдите в папку:
C:Program Files (x86)Arduinolibraries
И создайте папку под названием StepperMotor.
Переместите созданные файлы .h и .cpp в созданную папку.
Теперь вы можете импортировать библиотеку в IDE (sketch > import library. > StepperMotor) с помощью директивы
ULN2003 драйвер нагрузок на 7 каналов, ULN2803 — на 8 каналов
В 16-выводном корпусе ULN2003 размещены 7 транзисторов Дарлингтона, которые способны управлять нагрузками с током до 500 мА и напряжением до 50 В на канал.

Спектр применений ULN2003 весьма широк:
- логические буферы,
- управление реле и электромагнитными клапанами,
- управление шаговыми двигателями и щеточными двигателями постоянного тока,
- управление светодиодными и газоразрядными индикаторами.
Основные параметры ULN2003А, ULN2004А
- напряжение коллектор-эмиттер выходного ключа — 50 В,
- пиковый ток коллектора — 500 мА,
- суммарный ток всех каналов протекающий через общий вывод — 2,5 А,
- диапазон рабочих температур -60°C..150°C.
На самом деле существует несколько типов похожих транзисторных сборок начнем с самой распространенной 2003 серии.
Схема одного из каналов в микросхемах ULN2003A, ULQ2003A и ULN2003AI.

Каждый из семи каналов содержит по два биполярных транзистора, резистор 2,7 кОм ограничивающий базовый ток, и два резистора на 7,2 кОм и 3 кОм защищающие транзисторы от открывания обратным током коллектора. Кроме того к схеме добавлены три защитных диода: первый защищает вход от отрицательного напряжения, два других защищают выход от отрицательного напряжения и от превышения напряжения на транзисторах выше питающего.
Наличие защитных выходных диодов актуально при работе на индуктивную нагрузку: диод для шунтирования обмотки реле или обмотки шагового двигателя уже встроен в микросхему и не нужно устанавливать внешний диод. А при использовании 7 каналов – 7 внешних диодов.
Управление ULN2003
Входная часть сборок ULN2003A, ULN2003AI, ULQ2003A спроектирована так чтобы работать совместно с ТТЛ и 3,3 В и 5 В К-МОП логикой.
ULN2002A создана для p-МОП логики.
Во входных цепях ULN2002A добавлен стабилитрон на 7 В и увеличено сопротивление базового резистора до 10,5 кОм, благодаря этому сборка может работать с входными напряжениями от 14 до 25 В.

Сборка ULN2004A, ULQ2004A предназначена для К-МОП логики с уровнем напряжений от 6 до 15В.
По сравнению с ULN2003, у ULN2004 просто увеличено сопротивление базового резистора до 10,5 кОм.

Как можно видеть на структурной схеме, входы и выходы расположены напротив друг друга, что весьма удобно при разводке печатной платы.

ULN2003 выпускается как для объемного монтажа: PDIP, так и для поверхностного: SOIC, SOP и TSSOP.
Схема включения ULN2003.
Одной ULN2003 можно управлять сразу 7 нагрузками, но когда нету такого количества нагрузок, то для увеличения надежности можно объединять каналы. Например 1,2 каналы использовать для первой обмотки; 3,4 для второй обмотки, а 5,6,7 для третьей.

Аналоги ULN2003
Разные зарубежные производители выпускают свои аналоги ULN2003: L203, MC1413, SG2003, TD62003. Так же есть и отечественный аналог: К1109КТ22.
8-ми канальный драйвер нагрузки ULN2803A, ULN2804A
Для работы с микроконтроллерами может быть более удобнымы 8-ми канальные драйверы. И у семиканальных ULN2003, ULN2004 есть их восьмиканальные братья ULN2803, ULN2804.

Точно также как и ULN2003 — ULN2803 рассчитан на управление от ТТЛ-логики и низковольной К-МОП, а ULN2804 от К-МОП питающейся в диапазоне 6 .. 15 В. Отличия ULN280X от ULN200X только в дополнительном канале и 18-выводном корпусе.
У ULN2803А есть отечественный аналог: К1109КТ63.
Драйверы нагрузки ULN2023A, ULN2024A
Третья двойка в названии сборки вместо нуля означает, что выходное напряжение может достигать 95 В, в остальном параметры и схемотехника этих сборок повторяют своих собратьев.
Навигация по записям
14 thoughts on “ ULN2003 драйвер нагрузок на 7 каналов, ULN2803 — на 8 каналов ”
ULN2003A не только как драйвер микроконтроллера хороша (предполагаю, что в 1976 году её точно с микроконтроллерами никто не использовал ), но и например как драйвер для 74HC595. С помощью 3-х выводов микроконтроллера управляем 74HC595, и получаем масштабируемое решение по управлению реле, шаговыми двигателями, светодиодами т.е. там где не нужны большие частоты.
Ну, не знаю… я ее в первый раз увидел в конце 90_х ковыряя термоконтроллер изготовленный в Великобритании в конце 70_х годов прошлого века. Устройство было на микроконтроллере, а ULN2003A работали в нем драйверами семисегментного светодиодного индикатора. Децимальная точка там не отображалась, и для индикации нужной информации достаточно было семи ключей. Думаю, семь ключей в этой микросхеме только из-за ограничений выбранного для нее корпуса.
Назрел вопрос — что-то подобное в более многоногих корпусах существует? Так то я всегда пользовался логикой с открытым коллектором или транзисторными ключами, но чисто на перспективу хотелось бы знать. И еще немного не в тему — не выпускались ли импортные аналоги К155ИД1? Довольно актуально сейчас в любительской практике, когда вернулась мода на газоразрядные индикаторы.
Импортный аналог К155ИД1 — SN74141N от TI, можно взять на алиэкспрессе от полутора долларов за штучку. Я считаю что это дорого.
Если нужно управлять ровно байтом (например семисегментный индикатор и точка) то подойдет аналог ULN2003A в 18 выводном корпусе — ULN2803A. С большим числом каналов драйверы не попадались.
Спасибо за подсказку. Но да, цены совершенно негуманные. Дешевле 1,1 доллара за штуку не нашел, плюс пересылка. На ебее еще страшнее, от 150 руб за штуку. И главное, все в dip корпусах, а я рассчитывал найти импортный аналог в soic… В таком случае возьму наши ИД1, их от 25 руб продают с рук.
Упс! А я только что нашел способ нестандартного использования ULN2003 как драйвера клавиатуры на 7 кнопок. Уровни с кнопок на входы, защитные диоды в качестве шифратора с 7 на 1, а сигнал высокого уровня с вывода 9 будет сигналом разрешения или прерывания, по которому МК будет выполнять процедуру прерывания с опросом состояния клавиатуры. Конечно, 8 линий занятые клавиатурой не есть хорошо. Но при необходимости отправлять контроллер в спячку и быстрого опроса кнопок по прерыванию, да при наличии большого количества свободных выводов, думаю, идея может найти хотя бы ограниченное применение.
Получается, что ULN2003 используется как диодная сборка из 7 диодов с общим катодом, мне кажется что дешевле будет взять две диодных сборки BAV70S — в каждой по две пары диодов с общим катодом, итого получаем 8 входов в более компактных корпусах, да и дешевле выйдет.
Вот вот, насчет низких частот. Этот недостаток ULN2003 обусловлен включением транзисторов по схеме Дарлингтона. Он ее еще до 76-го запатентовал, в 53-м, если память не изменяет. Так, с тех пор, и тянутся за токовыми ключами такого включения все их недостатки: и малая частота, и низкое КПД, и искажения сигнала… А вот используют до сих пор. Мощность при простоте — решают все, по крайней мере для пром автоматики. Клапана, шаговики, реле, подача. Все мощное, грубое и медленное.
Медленное… Как сказать. Типовое время включения 0,1мкс,выключения 0,2мкс.В пору импульсным стабилизатором управлять.
Два защитных диода и на общий провод и на плюс, можно подключать к индуктивной нагрузки без проблем. Удобно контроллер всегда чем то управляет тут легко подключил эту микросхему, которая выдерживает достаточно большой ток. Плохо,что только семь каналов в контролере часто требуется задействовать порт целиком,а это 8 каналов. И добавил бы производитель еще один канал.
В те времена о байтной привязке особо не думали, делали, как в корпус ляжет. В 16-ножечный, минус питание — как раз семь элементов И-НЕ помещалось. Для других целей, можно и другие ключевики найти, их много разных, для разных целей.
В те времена были популярны 14 выводные корпуса DIP14. Два вывода на питание, остается 12: в повторителях и инверторах типа 155ЛН1 — 155ЛН3 по 6 элементов.
Эххх! Не попалась мне эта микросхема раньше. Сделал внуку игрушку — панели с выключателями , шпингалетами, разетками, рекуляторами, моторчиками и «лампочками».Управления сделал на дискретных элементах. Ничего — переделаю. А цена , нас радиолюбителей, не пугает.Работоспособность и удобство — вот главное.
Ничего, что цена не пугает. Особенно, если учесть цену кабеля от пульта управления к игрушке… если я правильно представил себе устройство управления. ЭТО — микросхема управления! А как вы будете ей, или чему другому передавать данное управление: последовательно или параллельно, аналоговым или цифровым методом — вот от чего зависит себестоимость и удобство изделия. А на чем собрана оконечная дискретика, на транзисторных ключах, их сборках или, даже, на банальных релюхах — дело десятое.
Для реле удобно использовать tpic6c595 (tpic6b595) — это 75HC595+ULN2803 выполненное в одном корпусе
Работа с шаговым мотором 28BYJ-48 и драйвером ULN2003
Сегодня вы узнаете о четырехфазном шаговом двигателе 28BYJ-48, работающим от постоянного напряжения 5 Вольт. Также существует его модификация на 12 Вольт. Двигатель потребляет значительный ток, а это значит, что мы не можем подключить его напрямую к выводам Arduino. Воспользуемся для этого драйвером двигателя на микросхеме ULN2003.

Технические параметры двигателя 28BYJ-48
- Модель: 28BYJ-48
- Тип двигателя: Униполярный
- Напряжение питания: 5 Вольт, DC
- Количество фаз: 4
- Частота: 100 Гц
- Сопротивление: 50Ω ± 7% (при 25 ℃)
Общие сведения о движке
4-х фазный шаговый двигатель 28BYJ-48 — это бесколлекторный двигатель, имеющий дискретное перемещение (вращение вала осуществляется шагами). На роторе (валу), расположен магнит, а вокруг него находятся катушки. Подавая поочередно ток на эти катушки, создается магнитное поле, которое отталкивает или притягивает магнитный вал, заставляя двигатель вращаться. Такая конструкция позволяет с большой точностью управлять валом, относительно катушек. Принципиальная схема четырехфазного шагового двигателя 28BYJ-48 приведена ниже.

Двигатель называется четырех фазным, из-за того, что в нем содержится две обмотки, которые, в свою очередь, разделены на четыре. (Это отражено на схеме выше). Центральные отводы катушек подключены вместе и служат для питания двигателя. Так как каждая обмотка подключена к питанию, такие двигатели называют униполярными. На роторе 28BYJ-48 расположено 8 магнитов, с чередующимися полюсами (то есть, четыре магнита с двумя полюсами).

На рисунке видно, что внутри расположен редуктор, с примерным передаточным числом в 1:64, если быть точнее 1:63,68395. Это значит, что двигатель за один оборот осуществляет 4075.7728395 шага. Данный двигатель поддерживает полушаговый режим и за один полный оборот может совершать 4076 шага, а точнее за 1° делает примерно 11,32 шага. (4076 / 360 = 11,32).
Режимы работы двигателя:
Чаще всего, при использовании шагового двигателя 28BYJ 48, используют два режима подключения.
- Полушаговый режим — за 1 такт, ротор делает ½ шага.
- Полношаговый режим — за 1 такт, ротор делает 1 шаг.
Ниже представлены таблицы последовательности тактов:


Модуль управления шаговым двигателем ULN2003:
Цифровой вывод микроконтроллера выдает ток до
40 мА, а одна обмотка 28BYJ-48 в пике потребляет
320 мА, то есть, если подключить двигатель напрямую, микроконтроллер сгорит. Для защиты был разработан модуль шагового двигателя ULN2003, в котором используется микросхема ULN2003A (состоящая из 7 ключей), которая позволяет управлять нагрузкой до 500 мА (один ключ). Данный модуль может работать с 5 Вольтовым и 12 Вольтовым двигателем 28BYJ-48. Для переключения необходимо установить или убрать перемычку (по умолчанию перемычка установлена на питание 5 Вольт).

С принципиальной схемой модуля ULN2003 можно ознакомиться на рисунке ниже

- 1 — GND: «-» питание модуля
- 2 — Vcc: «+» питание модуля (5В или 12В)
- 3 — Vcc: «+» питание модуля (перемычка, только при 5В)
- 4 — Vcc: «+» питание модуля (перемычка, только при 5В)
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.


 Упрощенные анимированные схемы работы шагового двигателя
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
- Двигатели с переменными магнитами (применяются довольно редко);
- Двигатели с постоянными магнитами;
- Гибридные двигатели (более сложные в изготовлении, стоят дороже, но являются самым распространенным видом шаговых двигателей).
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
 Драйвер двигателя L298N
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
 Подключение шагового двигателя к Ардуино на базе L298
Подключение шагового двигателя к Ардуино на базе L298
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
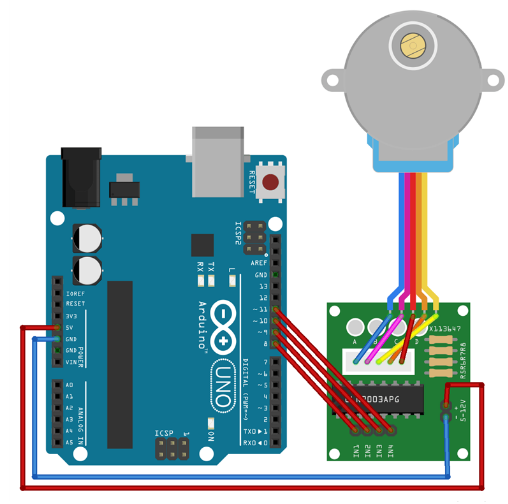 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
 Принципиальная схема подключения шагового двигателя
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.

Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.

Основные характеристики двигателя:
- Угловой шаг 1,8°, то есть на 1 оборот приходится 200 шагов;
- Двигатель – двухфазный;
- Рабочие температуры от -20С до 85С;
- Номинальный ток 1,7А;
- Момент удержания 2,8 кг х см;
- Оснащен фланцем 42 мм для легкого и качественного монтажа;
- Высокий крутящий момент – 5,5 кг х см.
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.

- Номинальное питание – 5В;
- 4-х фазный двигатель, 5 проводов;
- Число шагов: 64;
- Угол шага 5,625°;
- Скорость вращения: 15 оборотов в секунду
- Крутящий момент 450 г/сантиметр;
- Сопротивление постоянного тока 50Ω ± 7% (25 ℃).
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя. Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Шаговый 4-х фазный двигатель 5V с платой управления ULN2003










- Описание
Шаговый 4-х фазный двигатель 28BYJ-48-5V с платой управления ULN2003
Такие двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол. Вращение вала шагового двигателя состоит из малых перемещений – шагов. 28BYJ-48-5V – шаговый двигатель низкой мощности. Чаще всего мы видим результат работы маломощного шагового двигателя интересуясь который час глядя на стрелки циферблата электромеханических часов. Работа более мощных шаговиков нам видна когда мы следим за перемещением каретки матричного или струйного принтера.
Одно из множества применений 28BYJ-48-5V в любительской робототехнике – использование для привода колес шасси. Используя 28BYJ-48-5V легко получить модель электропривода робота относящегося к классу мотор-колесо. Это позволяет собирать роботов способных развернуться на месте и обладающих точным позиционированием в пространстве благодаря цифровому управлению двигателем. Смотрим видео.
Используя шаговый двигатель можно собрать локатор для обнаружения препятствий движению подвижной платформы. Ультразвуковой или ИК датчик отраженного излучения благодаря работе 28BYJ-48-5V могет поворачиваться в обоих направлениях в пределах требуемого угла. Будет происходить сканирование сектора окружающего пространства. Зная положение вала мотора благодаря импульсному управлению и дистанцию до препятствия получаемую от датчика, можно сформировать картину расположения окружающих предметов.
Существует модификация 24BYJ48-12V предназначенная для питания от 12 вольт используемая в кондиционерах для тяги шторок.
Импульс тока вызывает перемещение вала на угол обусловленный углом, занимаемым на роторе одним магнитом. Увеличение количества полюсов ротора уменьшает шаги, что позволяет нарастить точность позиционирования. Поворот вала на нужный угол под действием известного количества импульсов тока дает возможность исключить из системы управления механическим приводом контроль угла поворота.
Шаговый двигатель предназначен для вращения деталей механизмов с точно задаваемой скоростью регулируемой цифровым способом. Импульсы подают на фазы в определенной последовательности. 28BYJ-48-5V содержит пластмассовый понижающий редуктор.
Передаточное число редуктора двигателя 28BYJ-48-5V примерно 64:1.
Чаще всего используются два способа управления: 4 ступени импульсов и 8 ступеней. В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления. Программная библиотека Stepper для Arduino IDE использует именно такой способ управления. Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.
В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.
Более наглядно теория изложена в следующем видео о подключении 28BYJ-48-5V к Raspberry Pi.
Cкорость вращения
номинальная 15 об/мин
максимальная 25 об/мин
Питание
напряжение 5 В
ток
каждая обмотка 160 мА,
в 4-шаговом режиме 320 мА,
при быстром вращении 200 мА.
Сопротивление фаз при измерении от провода питания 41 Ом
Количество шагов ротора 64
Коэффициент редукции 1/63,68395
Угол шага двигателя без учета редуктора
при 4-ступенчатой последовательности 11,25 ° (32 шага на оборот)
при 8-ступенчатой последовательности 5,625 ° (64 шага на оборот)
Количество шагов вала мотора 28BYJ-48 за один оборот
в 4-ступенчатой последовательности 32 x 64 = 2048
в 8-ступенчатой последовательности 64 x 64 = 4096
Крутящий момент не менее 34,3 мНм (120 Гц)
Тормозящий момент 600–1200 гсм
Тяга 300 гсм
Изоляция класса А
Шум на расстоянии 0,1 м не более 35 dB
Вес 33 г
Размеры мотора 28BYJ-48-5V.
Так как основное назначение мотора управление шторкой кондиционера то коэффициент редуктора не точно соответствует 1:64, а на самом деле 1:63,68395. Это означает, что будет не 4096 шагов на оборот, а 4075,772.
ПЕРЕДЕЛКА В БИПОЛЯРНЫЙ – УВЕЛИЧЕНИЕ МОЩНОСТИ
При необходимости удвоения крутящего момента выполняют простую доработку схемы соединения фаз в двигателе. При этом красный провод питания будет не задействован, а мотор 28BYJ-48-5V становится двухфазным биполярным. В схеме управления будет использовано 4 провода. Доработка заключается в разрыве дорожки как изображено на фото.
Модернизация мотора 28BYJ-48-5V.
Отводы от центров обмоток отсоединяются друг от друга и не используются. Теперь фазы и обмотки становятся одним и тем же.
Две фазы вместо четырех содержат витки, распределенные между двумя а не четырьмя фазами. Теперь у одной фазы вдвое большее количество витков. Одна фаза имеет контакты розовый, оранжевый другая желтый, синий. Магнитное поле при удвоенном количестве витков удваивается и крутящий момент возрастает. Но схема управления сложнее. Она должна коммутировать обмотки так, чтобы ток мог протекать в обоих направлениях. Поэтому двигатель 28BYJ-48-5V после доработки становится биполярным. Управление двумя фазами, а не четырьмя снижает дискретность перемещения в два раза. Более подробно о переделке рассказано в видеофрагменте.
Модуль ULN2003 управления шаговым двигателем
Электронный модуль содержащий микросхему ULN2003A предназначен для управления однополярным четырехфазным шаговым двигателем. Модуль принимает на себя нагрузку по силовой коммутации токов фаз мотора, защищая управляющую логическую схему от перегрузки по току и от перегрева. Например, при возрастании нагрузки на валу, в этот момент потребление тока увеличивается.
Ток нагрузки одного выхода предельный 500 мА
Напряжение питания 5 или 12 В
Размеры 28 x 28 x 20 мм
ЭЛЕКТРИЧЕСКАЯ СХЕМА ULN2003A
Схема модуля ULN2003A.
На входы модуля IN1…IN4 поступают сигналы управления мощными ключами, входящими в состав микросхемы U1. Схема мощного ключа U1 на составном транзисторе приведена в верхнем левом углу изображения. Нагрузка подключается к соединителю CONM-MTR. В нашем случае это фазы двигателя. Вспомним, что все фазы мотора подключены одним контактом к положительному полюсу питания схемы. Под действием управляющего сигнала на входе Input X открывается выходной транзистор микросхемы и соединяет выход Output X с общим проводом. К выходам Output подключены вторые контакты фаз. Диод в схеме составного транзистора подключен к контакту COM, здесь это провод питания. Роль этого диода состоит в ограничении выходного напряжения не выше напряжения питания микросхемы плюс примерно 0,6 вольт. Такая защита цепей схемы необходима из-за импульсов напряжения появляющихся при коммутации фаз двигателя.
Светодиоды показывают какой выход микросхемы подключен к общему проводу. Для их работы следует установить перемычку J1. Она устанавливается только при питании модуля 5 В. Отслеживание свечения светодиодов помогает отладить схему соединения двигателя и управляющую программу. В дальнейшем для экономии тока питания перемычка J1 снимается.
Соединитель на жгуте двигателя устанавливается в ответную часть разъема на плате модуля. Питание подключается к штырям + и – возле перемычки. Для питания следует использовать отдельный источник, дающий ток до 1 А.
Соединения двигателя 28BYJ-48-5V и модуля управления ULN2003A.
ПРОГРАММИРОВАНИЕ В ARDUINO IDE
Stepper – программная библиотека входит в Arduino IDE и предназначенная для работы с шаговыми двигателями без редуктора. Библиотека Stepper поддерживает только полношаговый метод управления и имеет сильно ограниченные возможности. Предназначена для решения простых задач при управлении одним двигателем.
Stepper2.ino – программа, содержащая полный набор функций, которые могут быть использованы для запуска 28BYJ-48-5V. Обсуждение программы на странице куда ведет ссылка. Планы преобразовать программу в полноценную библиотеку так и не были реализованы.
Custom Stepper – библиотека может быть использована для управления различными шаговиками, но настройки по умолчанию для 28BYJ-48-5V.
AccelStepper – библиотека работает эффективно. Нагрев двигателя меньше, поддерживает изменение скорости.
Имеет объектно-ориентированный интерфейс для 2, 3 или 4-выводных шаговых двигателей.
Поддержка регулировки скорости.
Поддержка нескольких шаговых двигателей.
Функции API не используют функцию delay и не прерывают работу.
Поддержка выбора функции для шага позволяет работать совместно с библиотекой AFMotor.
Поддержка низких скоростей.
Расширяемый API.
Поддержка подклассов.
Набор для использования шагового двигателя в различных приборах. Поставка вместе с двигателем платы управления ULN2003A сокращает время на наладку и сборку электромеханического прибора. Шаговый двигатель и управляющий им модуль имеют соединители одного типа. Использование набора совместно с микроконтроллерным модулем позволяет собирать различные моторизованные системы. Набор ориентирован на специалистов хорошо владеющих программированием и не имеющих большого опыта монтажа пайкой. Предназначен для привода широкого спектра механизмов.
Шаговый 4-х фазный двигатель 5V с платой управления ULN2003 должны подключаться к одному источнику питания 5 В.
Arduino.ru
ULN 2003 как соиденять?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

я пробавал на 1..7 HIGH or LOW от ардуино на 9 дал другои 12V+ — как по силке

нефига не работает
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
обесните проше ктота пажалуста
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
http://www.getchip.net/wp-content/uploads/0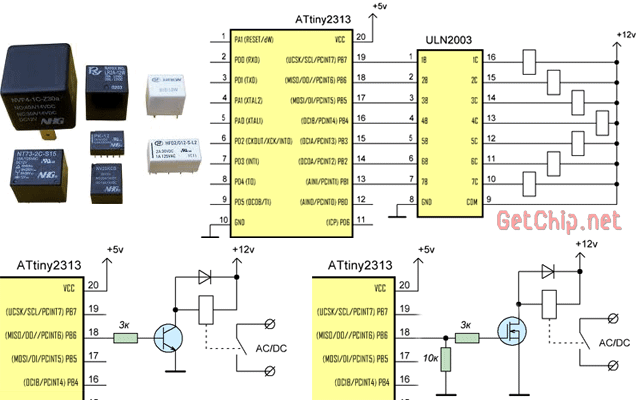
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

Если при таком подключении и подачи HIGH на пин 1 ничего не произойдет то:
1- попробуйте другую 2003 (возможно нерабочая)
2- представте скетч (не подаеться сигнал на пин 1)
3- еще очень много причин
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
почему если отрубить роботает? получается что бирёт от ардуино?

- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
И что нормально работает? Сегодня лень завтра попробую, самому интересно стало.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
для uln2003 нет необходимости в подключении 9 вывода при слаботочной нагрузке, в данном случае светодиода и обязательно при подключении сильноточной (реле). это не вывод питания и здесь всего-то встроены диоды меж выходами 10-16 и 9 выводом.
смотрим даташит, там все понятно.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
У меня тоже вопрос по подключению ULN2003 (2803).
Хочу коммутировать +12В на 8 выводов.
На COM подаю +12В. На каждом выходе (в зависимости от сигнала с ардуины) хочу получить 0 или +12В.
По этой схеме подключения:
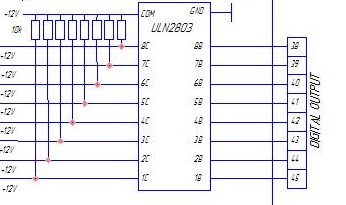
получил на всех выводах +12В.
Когда запускаю скетч, получаю на всех (семи) выходах +0,63В, а на нужном (на восьмом) выходе +12В.
В автомобиле вообще получил нонсенс, +2,2В на всех выводах (должно быть 0), +1,1В на нужном выходе (должно быть +12В).
Нагрузка в авто минимальна — сигнал на ЖКИ.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
не уверен по поводу 2803, но 2003 вообще-то на своих «выходах». никакого сигнала не формирует.
Ничего она на них «не выдает». Она соединяет свой «выход» с землей, если есть логическая единица на соотвествующем логическом входе. То есть работает как «кнопка присоедененная к земле». Которую можно нажимать выходом микроконтроллера.
Не идеальный ноль, может быть если транзистор не до конца открылся (например не хватает управляющего сигнала). А может 0.63v это и есть «его норма» в открытом состоянии. Нужно в даташит вчитываться какие-там у нее у него характеристики. Но вообщем и 0.63v — это логический ноль.
И еще. Обратите внимание. То что на вашей картинке обозначенно как «Digital Output» — это выходы микроконтроллера. Для микрухи — это «управляющий вход».
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Вы не там или не то измеряете, вам нужно просто правильно подключить нагрузки к ULN2803(2003). И вы должны понимать, что у ULN2803 общий плюс, а в большинстве машин общий минус. Т.е. к примеру: к какой-нибудь лампочке подходит один провод, при нажатии на какую-нибудь кнопку на этом проводе появляется +12В и лампочка загорается потому, что второй вывод лампочки постоянно соединен с массой, а масса, в свою очередь, с минусом аккума. Так вот с помощью ULN2803 не получится управлять этой лампочкой просто подключившись к этому же проводу. Т.к. в случае с ULN2803 на лампочке должно быть постоянно +12В, а при появлении логической 1 на входе ULN2803, ее выход «замыкается» на минус и только в этом случае лампочка загорается.

Общий принцип работы ULN2803 схож с общий принципом работы NPN-транзистора.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Спасибо, за разъяснения.
Но я слабо понял как мне использовать ULN2803 применительно для моей задачи.
Так, что инвертеры какие-то ставить на выходах или что?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Причем тут инвертеры?
Еще раз. Представте себе ULN как кнопку. Которая одним концом всегда подключена к нулю, а на другой вы подключаете нагрузку.
Кнопка — ничего не выдает. Следовательн «инвертировать» — нечего. Ее «выход» просто либо подключен к земле, либо нет.
Вам нужно либо искать ее аналог, который «как бы кнопка к плюсу». Скорее всего нужно смотреть в сторону udn2981,TD62783. Если не ошибаюсь, это тоже самое только коммутирует не «землю», а «питание». Вообщем что-то типа «8-CHANNEL SOURCE DRIVER».
Могу ошибатся (не силен в схемотехнике), но если цель «рулить LCD», то, думаю, подойдет как ULN, так и UDN. Нужно просто ее выходы, через подтягивающие резисторы притянуть либо к питанию (при использовании ULN), либо к земле (при использовании UDN).
Например на схеме из сообщение #11. На ногах «выходах» будет либо «почти ноль», либо «почти 12-ть». Насколько это «почти» будет большим — зависит от резисторов (которые к плюсу подключены). Чем больше резистор — тем больше «почти», но меньше ток. Какой конкретно — считаем с помощью закона Ома.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Вообщем соберите схему сообщение #11. Можно не в реальности, а в протеусе. Так где нарисованны «спиральки» — поставте резисторы (например на 1K). Попосылайте что-нибудь на вход, и посмотрите тестером что имеете на выходных ногах.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Так может вы поделитесь с нами своей задачей. что б нам не гадать, что вы пытаетесь добиться от ULN.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
На моем авто с МКПП установлена комбинация приборов с ЖКИ от АКПП с возможностью индикации включенной передачи КПП.


Имеется разъем (на моем авто не задействован) в котором 8 выводов.
Для того чтобы на ЖКИ зажглась нужная передача (1,2,3,4,P,D,R,N) нужно подать только на один из 8 контактов разъема +12В. Цепи очень слаботочные, даже не смог замерить.

Реализовал схему для индикации на 8-ми реле с управлением от ардуино, но это уж слишком — использовать восемь 10А реле для такой ерунды, тем более они еще и щелкают.
Посоветовали ULN2803 которые тоже имеют 8 выводов, но не предупредили что они «-» коммутируют, а мне надо +12В.
В схематехнике я 0.
Было бы оптимально использовать аналог ULN2803 с выводами +12В.
udn2981 выглядит подходяще, наверное, как подключить для моей задачи?
Думается, что вот так:
только видимо все резисторы на землю, а не на +12В.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
>Думается, что вот так
Походе на правду. Слева — выходы на экран. Тыкайте в них тестер, смотрите что там получается. Открывайте даташит на экран и смотрите воспримет он эти значения как логические 0,1 (или просто «попробуйте). Если нет — уменьшать значение резисторов.
Только в скетче, нужно будет инвертировать управляющие сигналы. Писать digitalWrite(LCDGear1Relay1Pin, LOW); что-бы включить сегмент, и digitalWrite(LCDGear1Relay1Pin, HIGH); что-бы выключить.
>udn2981 выглядит подходяще, наверное, как подключить для моей задачи?
Не более чем ULN. Взаимозаменяемы (для данной задачи).
>только видимо все резисторы на землю, а не на +12В.
C ULN — нет. Нужно так как нарисовали на последней картинке. На землю если, все-таки, возмете UDN (но нет смысла если ULN уже имеется).
Для управление экраном вам нужно иметь возможность послать ему как 0, так и 1 (логический, то есть 12v).
Смотрите: ULN — «умеет делать» 0. Значит что-бы управлять экраном, вам нужна еще 1. Ее обеспечивают резисторы подтягивающие к питанию
UDN, наоборот, «умеет делать» 1. Значит, что-бы управлять эукраном, вам нужен еще 0. Его могут обеспечить резисторы подтягивающие к земле.
когда на управляющий вход, подано 5v. Она «открывается» и подсоединяет свой выход к земле. На нем образуется 0. Когда на управляющий вход, подан ноль, она «отсоединяет» свой выход от нуля. На нем может быть что угодно (ловит помехи из эфира). Это «просто проводок», через него ничего не идет. Что-бы этого не происходило, мы подключили его, через резистор (что-бы ограничить ток) к питанию.
Резистор это как бы «пружинка». Которая подтянула ногу в предсказуемое состояние. В 1. Когда же нога, внутри ULN, подключилась «к земле», то это прямое соединение, естественно «пересиливает» эту пружинку. Заряда поступающего через резистор не хватает для образования логической единицы. Значит там 0.
Единственный довод в против ULN — если смущает, что при выключенных сегментах, все время будет расходовтся небольшой ток, через эти резисторы. 0.0012A на каждый вывод. Ну и, при осутвии сигнала на входе, все сегменты будут «включены».
При использовании UDN — инвертировать в скетче не нужно, при остуствии сигнала — все выключены, 0.0012A расходуется впустую только для включенного сегмента.