

Как сделать робота из моторчика
Как и что можно сделать из моторчика от игрушки или бытовой техники
 Сделать что-нибудь полезное из негодных детских игрушек или бытовой техники мастеру-фантазёру не проблема. И хорошо, что многие электрические приборы устаревают и ломаются. Такие вещи отдавать в починку не имеет смысла — проще купить что-то новое. А истинные «самоделкины» только этого и ждут. У них сразу возникает целый ворох идей, которые требуют немедленного воплощения.
Сделать что-нибудь полезное из негодных детских игрушек или бытовой техники мастеру-фантазёру не проблема. И хорошо, что многие электрические приборы устаревают и ломаются. Такие вещи отдавать в починку не имеет смысла — проще купить что-то новое. А истинные «самоделкины» только этого и ждут. У них сразу возникает целый ворох идей, которые требуют немедленного воплощения.
Вторая жизнь детских игрушек
Бывают случаи, когда самоходная игрушка разбивается вдребезги. Наверное, чтобы успокоить ребёнка, нужно срочно купить новую? Вовсе не обязательно. Необходимо просто запустить процесс общесемейного творческого мышления. А для этого из разбитой машинки извлечь оставшиеся годные детали вместе с мотором. Затем собрать все игрушки в доме и остановить свой выбор на той, которую можно ещё раз оживить. Наверное, здесь понадобятся школьные знания по физике, химии и электротехнике.
Ремонт старого вертолетика
 На глаза вдруг попался старый забытый вертолёт с негодным двигателем и поломанными лопастями, который давно валялся на антресолях. Он, видимо, ждал своего звёздного часа и теперь с удовольствием показывал бело-голубые бока с полустертой надписью «СССР-0098».
На глаза вдруг попался старый забытый вертолёт с негодным двигателем и поломанными лопастями, который давно валялся на антресолях. Он, видимо, ждал своего звёздного часа и теперь с удовольствием показывал бело-голубые бока с полустертой надписью «СССР-0098».
С такими вещами нужно обращаться аккуратно. Старина не любит суеты. Придётся осторожно снять остатки большого главного винта, открутив несколько маленьких шурупов. Чтобы проникнуть в моторный отсек, необходимо снизу убрать пластмассовую коробку для батарей. Двигатель держится на трёх болтиках и имеет, как и положено, два провода «плюс» и «минус», которые через блок микросхем соединяются с тумблером включения. Все это необходимо аккуратно отпаять и открутить.
Вытащив двигатель на белый свет, нужно его осмотреть и сравнить с мотором от машинки. Дело в том, что для создания подъёмной силы достаточно 250 -270 об/мин. и мощности 1 — 2 ватт. Разница в характеристиках двигателей оказалась небольшой. Тогда можно смело ставить на вертолёт свежий мотор. И затем сходить в магазин для моделистов за новеньким несущим винтом. Когда всё готово, проводят испытание отремонтированной винтокрылой машины в присутствии всей творческой семьи.
По такой же схеме чинят и современные детские модели вертолётов. Только сейчас они радиоуправляемые, и поэтому придётся раскошелиться и на пульт управления, от которого зависят обороты несущего винта и скорость вертолёта.
Новый двигатель для игрушечной машины
 Для того чтобы сделать детскую маленькую машинку, нужны: колёса, сам корпус автомобиля, провода, пульт управления, разнообразные электронные платы и моторчик. При наличии всего этого добра приступают к созданию модели. Нет необходимости искать двигатель, так как он уже есть. Сам корпус автомобиля можно смастерить своими руками из дерева или пластика и оформить на свой вкус. Хорошо тем мастерам, кто имеет в доме небольшой 3 D принтер, который соорудит любую форму модели.
Для того чтобы сделать детскую маленькую машинку, нужны: колёса, сам корпус автомобиля, провода, пульт управления, разнообразные электронные платы и моторчик. При наличии всего этого добра приступают к созданию модели. Нет необходимости искать двигатель, так как он уже есть. Сам корпус автомобиля можно смастерить своими руками из дерева или пластика и оформить на свой вкус. Хорошо тем мастерам, кто имеет в доме небольшой 3 D принтер, который соорудит любую форму модели.
Часто машинку делают совсем просто. Берут давно заброшенный маленький детский автомобиль с колёсами, разбирают до винтика и пытаются его автоматизировать с помощью готового моторчика. При этом применяются: клей, изолента, маленькие шестерёнки от часов, редукторы от старых моделей и многое другое. И люди, для которых такая забава стала настоящим хобби, часто добиваются большого успеха в самоделках из моторчика.
Вентилятор из бутылки и старых дисков
 Когда сделаны и опробованы несколько новых моделей детских машин, остаётся заняться общеполезным делом. Необходимо сконструировать вентилятор, который освежал бы воздух и нагонял новые идеи. Для этого нужно всего лишь несколько предметов, находящихся под руками. А именно:
Когда сделаны и опробованы несколько новых моделей детских машин, остаётся заняться общеполезным делом. Необходимо сконструировать вентилятор, который освежал бы воздух и нагонял новые идеи. Для этого нужно всего лишь несколько предметов, находящихся под руками. А именно:
- моторчик от детской игрушки (без него никуда);
- CD диски штук 6-7;
- пластиковая пробка от бутылки;
- картонная трубка высотой примерно 10 см и диаметром 3 — 4 см;
- выключатель;
- клей.
Изготовление начинается с разрезания диска на 8 равных частей от края до центра, не доходя примерно 1,5 см до отверстия. Затем полученные секции необходимо вывернуть одним краем наружу, чтобы получились лопасти. Изготовленный диск одевают на пробку, внутри которой делают отверстие для посадки на моторчик.
Теперь мастерят ножку и подставку. Картонная трубка запросто сойдёт за ножку. Внутрь её спрячут провода и батарейки. Оставшиеся несколько дисков могут служить отличной подставкой. Всё это хорошо приклеивают и красят в разные оттенки. Вентилятор готов к работе.
Кораблик на моторном ходу
 Для того чтобы ребёнок не зависал сутками за компьютером, его нужно постепенно приучать к изготовлению разнообразных и интересных вещей, которые он сможет смастерить своими руками. Скоро весна, побегут ручьи, и понадобится маленький кораблик, который будет символизировать наступающее долгожданное тепло.
Для того чтобы ребёнок не зависал сутками за компьютером, его нужно постепенно приучать к изготовлению разнообразных и интересных вещей, которые он сможет смастерить своими руками. Скоро весна, побегут ручьи, и понадобится маленький кораблик, который будет символизировать наступающее долгожданное тепло.
Необходимые материалы ребёнок найдёт у себя в комнате. Здесь нужны:
- пальчиковые батареи 3 штуки;
- пенопласт, изолента, клей;
- моторчик от CD-привода или игрушки;
- пластиковая крышка от лимонадной бутылки;
- два кусочка пластмассы и железные шайбы.
Первым делом нужно изготовить гребной винт. В пробке готовят прорези для лопастей. Плоские палочки от мороженого и являются готовыми лопастями будущего кораблика. Затем в пробке проделывают отверстие для посадки этого винта на моторчик. Все это хорошенько проклеивают. Силовая установка готова.
Далее, из пенопласта вырезают форму корабля. Переднюю часть лодки делают треугольной, на корме готовят место для гребного винта с моторчиком, а посередине нужно углубление для батареек. Все соединяют и проклеивают. Проводят испытания в ванной и с нетерпением ждут первых весенних луж.
Машинка-глиссер
Эта самая увлекательная игрушка, созданная и опробованная ребёнком. По земле такая машинка передвигается на колёсах, а по воде на специальной лодочке. Изготавливается за 2 — 3 часа.
-
 квадратная пластиковая бутылка;
квадратная пластиковая бутылка; - крышки от бутылок из-под лимонада;
- деревянная шпажка для барбекю;
- моторчик, выключатель, батарейка;
- клей.
Делают силовую установку. Она представляет собой двигатель с пропеллером. Лопасти вырезают, используя горлышко бутылки.
Должна получиться розочка. По фото видно, что потом её накручивают на пробку, прикреплённую к моторчику.
Затем делают ходовую часть. Для этого используют шпажку. На неё надевают пробки, которые служат колёсами. Крепят всё к квадратной бутылке, внутрь которой укладывают батареи. Соединяют проводами согласно электрической схеме. Глиссер готов. При желании можно пластиковый пропеллер заменить более жёстким. Тогда ходовые качества такой машинки оценит не только сам конструктор, но и его друзья.
Ползающий робот
 Изготовление робота занимает всего несколько часов. Это не совсем робот, который люди представляют себе. Он не ходит, не плавает, а хаотично ползает по гладкой поверхности. Создаётся такой эффект за счёт разбалансировки вращения ротора моторчика. Для настоящих автомобилей это приводит к трагической аварии, а здесь вызывает лишь улыбку.
Изготовление робота занимает всего несколько часов. Это не совсем робот, который люди представляют себе. Он не ходит, не плавает, а хаотично ползает по гладкой поверхности. Создаётся такой эффект за счёт разбалансировки вращения ротора моторчика. Для настоящих автомобилей это приводит к трагической аварии, а здесь вызывает лишь улыбку.
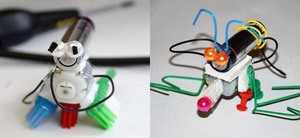
Итак, для создания робота нужен моторчик и батарейка. На ось двигателя надевают маленький продолговатый кусочек пенопласта или пенокартона и приклеивают. Это служит дестабилизатором. На самый кончик его крепят декоративный лёгкий элемент.
Сверху моторчика устанавливают батарейку и обклеивают разными интересными детальками. Делают ему ноги из зубных щёток, глаза из шариков, украшают цветной проволокой или скрепками и так далее. При включении происходит значительная вибрация двигателя, которая и заставляет хаотично ползать игрушку.
Другие идеи
 Кроме всего вышеперечисленного, моторчики используются в таких самоделках, как минидрели и бормашины. В подобных устройствах не нужны лишние детали. У них одна задача — вращать закреплённое сверло.
Кроме всего вышеперечисленного, моторчики используются в таких самоделках, как минидрели и бормашины. В подобных устройствах не нужны лишние детали. У них одна задача — вращать закреплённое сверло.
Для этого на ось моторчика подбирают цанговый или обычный патрон, который будет зажимать маленькое сверло. Затем припаивают провода от двигателя к батареям через выключатель. Когда собранное устройство успешно заработало, его укладывают в корпус из-под антиперспиранта или какой-нибудь другой, который наиболее подходит под моторчик с батарейками. Всё это маленькое приспособление помещается в ладони. Выключатель всегда расположен под большим пальцем.
Такие устройства необходимы радиолюбителям для высверливания отверстий в печатных платах. Их также могут использовать мастера-краснодеревщики, которые занимаются тонкой объёмной резьбой по дереву. Только вместо сверла они вставляют пальчиковую микрофрезу для выборки и шлифовки труднодоступных мест.
Как видно, проявив немного фантазии и усердия, ребенок с помощью родителей может создать по-настощему оригинальные игрушки и другие полезные вещи.
КАК СДЕЛАТЬ РОБОТА
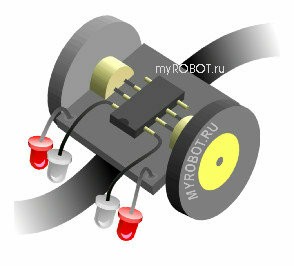
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов робот будет двигаться на свет или, наоборот, прятаться в темноту, бежать вперед в поисках света или пятиться, как крот, назад. Если добавить в схему робота пару ярких светодиодов, то можно добиться, чтобы он бегал за рукой и даже следовал по темной или светлой линии.
 Принцип поведения робота основывается на «фоторецепции» и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция — одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
Принцип поведения робота основывается на «фоторецепции» и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция — одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом — ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.
В устройстве робота, кроме микросхемы драйвера моторов L293D, будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с «землей» (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с «землей». Иногда рядом с такой черточкой пишут три буквы «GND», что означает «землю» (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.

Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Более подробно о работе с драйвером двигателей можно прочитать в предыдущей статье «Драйвер двигателей L293D».

Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если — небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя.
 Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Когда на один из фотосенсоров такого робота попадает свет, включается соответствующий сенсору электромотор и робот поворачивает в сторону света до тех пор, пока свет не осветит оба фотосенсора и не включится второй мотор. Когда оба сенсора освещены, робот движется навстречу источнику света. Если один из сенсоров перестает освещаться, то робот снова поворачивает в сторону источника света и, достигнув положения, при котором свет падает на оба сенсора, продолжает свое движение на свет. Если свет перестает падать на фотосенсоры, робот останавливается.
Схема робота симметричная и состоит из двух частей, каждая из которых управляет соответствующим электромотором. По сути, она является как бы удвоенной схемой предыдущего робота. Фотосенсоры следует располагать крест-накрест по отношению к электромоторам так, как показано на рисунке робота выше. Также можно расположить моторы крест-накрест относительно фотосенсоров так, как показано на монтажной схеме ниже.

 Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
 Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а «увидев» свет, будет поворачивать в сторону его источника. Когда свет будет падать на оба сенсора, робот остановится.
Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а «увидев» свет, будет поворачивать в сторону его источника. Когда свет будет падать на оба сенсора, робот остановится.
Дорогой Бобот, а можно ли использовать в приводимой схеме простейшего робота какие-либо другие микросхемы, например L293DNE?
Конечно, можно, но видишь ли, в чем дело, дружище Бибот. Настоящая L293D выпускается только группой компаний ST Microelectronics. Все остальные подобные микросхемы являются лишь заменителями или аналогами L293D. К таким аналогам относятся L293DNE американской компании Texas Instruments, SCP-3337 от Sensitron Semiconductor. Естественно, что, как и многие аналоги, эти микросхемы имеют свои отличия, которые тебе будет необходимо учитывать, когда ты будешь делать своего робота.
А не мог бы ты рассказать об отличиях, которые мне необходимо будет учесть при использовании L293DNE.
С удовольствием, старина Бибот. Все микросхемы линейки L293D имеют входы, совместимые с TTL-уровнями*, но лишь совместимостью уровней некоторые из них не ограничиваются. Так, L293DNE имеет не только совместимость с TTL по уровням напряжения, но и обладает входами с классической TT-логикой. То есть на неподключенном входе присутствует логическая «1».
Прости, Бобот, но я не совсем понимаю: как же мне это учитывать?
Если на неподключенном входе у L293DNE присутствует высокий уровень (логическая «1»), то и на соответствующем выходе мы будем иметь сигнал высокого уровня. Если мы теперь подадим на рассматриваемый вход сигнал высокого уровня, говоря по другому — логическую «1» (соединим с «плюсом» питания), то на соответствующем выходе ничего не изменится, так как на входе у нас и до этого была «1». Если же мы подадим на наш вход сигнал низкого уровня (соединим с «минусом» питания), то состояние выхода изменится и на нем будет напряжение низкого уровня.
То есть получается все наоборот: L293D мы управляли с помощью положительных сигналов, а L293DNE нужно управлять с помощью отрицательных.
 L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к «земле» подтягивающими резисторами.
L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к «земле» подтягивающими резисторами.
Тогда, при отсутствии положительного сигнала, на входе будет присутствовать логический «0», обеспечиваемый подтягивающим резистором. Хитроумные янки называют такие резисторы pull-down, а при подтягивании высокого уровня — pull-up.
Насколько я понял, все, что нам нужно будет добавить в схему простейшего робота, — так это подтягивающие резисторы на входы микросхемы драйвера моторов.
 Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Причем от номинала резистора R1 будет зависеть чувствительность нашего робота. Чем сопротивление R1 будет меньше, тем чувствительность робота будет ниже, а чем оно будет больше, тем чувствительность будет выше.
 А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к «земле». Что даже несколько упростит схему.
А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к «земле». Что даже несколько упростит схему.
И последний вопрос. А в тех схемах роботов, которые ты привел в рамках нашей беседы, может быть использована классическая микросхема L293D?
Конечно, может. И я бы даже добавил, что использование pull-down резисторов для L293D будет вполне оправдано.
Чтобы сделать робота, «бегающего» за рукой, нам понадобятся два ярких светодиода (на схеме LED1 и LED2). Подключим их через резисторы R1 и R4, чтобы скомпенсировать протекающий через них ток и предохранить от выхода из строя. Расположим светодиоды рядом с фотосенсорами, направив их свет в ту же сторону, в которую ориентированы фотосенсоры, и уберем сигнал с входов INPUT2 и INPUT3.
 Задача получившегося робота — реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля «зрения» одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Задача получившегося робота — реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля «зрения» одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Светодиоды следует подбирать достаточно яркие, чтобы отраженный свет устойчиво улавливался фототранзисторами. Хороших результатов можно достичь при использовании красных или оранжевых светодиодов с яркостью более 1000 мКд.
Если робот реагирует на вашу руку только тогда, когда она почти касается фотосенсора, то можно попробовать поэкспериментировать с листочком белой бумаги: отражающие способности белого листа намного выше, чем у человеческой руки, и реакция робота на белый листок будет намного лучше и устойчивее.
Белый цвет обладает самыми высокими отражающими свойствами, черный — наименьшими. Основываясь на этом, можно сделать робота, следующего по линии. Сенсоры при этом следует расположить так, чтобы они были направлены вниз. Расстояние между сенсорами должно быть немного больше, чем ширина линии.
 Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Примечание:
На всех рисунках роботов микросхема драйвера двигателей L293D показана условно (только управляющие входы и выходы).
Как сделать робота в домашних условиях для ребенка?
На полках современных магазинов для детей можно найти большое количество разнообразных игрушек. И каждый ребенок просит родителей купить ему ту или иную игрушечную «обновку». А если в планирование семейного бюджета не входит это? В целях экономии можно попробовать сделать новую игрушку самостоятельно. К примеру, как сделать робота в домашних условиях, возможно ли это? Да вполне возможно, достаточно подготовить необходимые материалы.
Можно ли собрать робота самостоятельно?
Сейчас сложно кого-то удивить игрушкой-роботом. Современная технологическая и компьютерная индустрия шагнула далеко вперед. Но все же вас может удивить информация о том, как сделать простого робота в домашних условиях.
Бесспорно, сложно понять принцип работы различных микросхем, электроники, программ и конструкций. Сложно обойтись в данном случае без базовых знаний в области физики, программирования и электроники. Даже несмотря на это, каждому человеку по силам собрать робота самостоятельно.

Роботом называется автоматизированная машина, которая способна выполнять различные действия. В случае с самодельным роботом достаточно и того, что машина просто передвигается.
Облегчить сборку помогут подручные средства: телефонная трубка, пластиковая бутылка или тарелка, зубная щетка, старый фотоаппарат или компьютерная мышь.
Вибрирующий жучок
Как сделать маленького робота? В домашних условиях можно изготовить наипростейший вариант вибрирующего жучка. Необходимо запастись следующими материалами:
- мотором от старой детской машинки;
- литиевой батарейкой серии CR-2032, похожей на таблетку;
- держателем для этой самой таблетки;
- скрепками;
- изолентой;
- паяльником;
- светодиодом.
Сначала необходимо обмотать светодиод изолентой, оставив при этом свободные кончики. Паяльником спаиваем один светодиодный конец с задней стенкой держателя для батарейки. Оставшийся кончик спаиваем с контактом моторчика от машинки. Скрепки будут служить лапками для вибрирующего жучка. Проводки от держателя для батарейки соединяются с проводами моторчика. Жучок будет вибрировать и двигаться после контакта держателя с самой батарейкой.
Щеткабот — детская забава
Итак, как сделать мини-робота в домашних условиях? Забавную машину можно собрать из подручных материалов, таких как зубная щетка (головка), двусторонний скотч и вибромоторчик от старого мобильника. Достаточно приклеить моторчик к головке щетки, и все — робот готов.
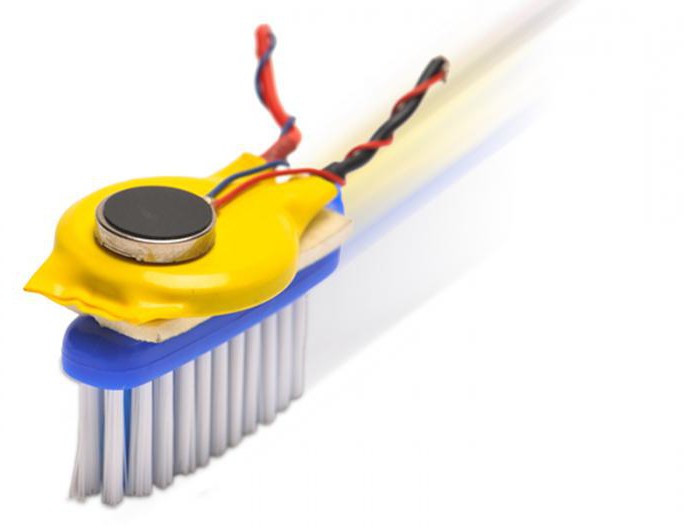
Электропитание появится благодаря плоской батарейке. Для дистанционного управления придется что-нибудь придумать.
Картонный робот
Как сделать робота в домашних условиях, если его требует ребенок? Можно придумать интересную игрушку из простого картона.
- двумя картонными коробками;
- 20 крышками от пластиковых бутылок;
- проволокой;
- скотчем.

Бывает, что папа хочет смастерить этакую диковину для малыша, но в голову не приходит ничего толкового. Поэтому можно подумать, как сделать настоящего робота в домашних условиях.
Для начала необходимо использовать коробку в качестве туловища для робота и вырезать у нее дно. Затем нужно сделать 5 отверстий: под голову, для рук и ног. В коробке, предназначенной для головы, нужно сделать одно отверстие, которое поможет соединить ее с туловищем. Для скрепления частей робота используется проволока.
После присоединения головы нужно подумать, как сделать руку робота в домашних условиях. Для этого в боковые отверстия просовывается проволока, на которую надеваются пластиковые крышки. Получаем подвижные руки. Так же поступаем и с ногами. Сделать отверстия в крышках можно шилом.
Рекомендации по сборке картонного робота
Для устойчивости картонного робота необходимо пристальное внимание уделить срезам. Именно они придают игрушке хороший внешний вид. Сложно соединить все части при неправильной линии среза.

Если вы решили склеить между собой коробки, то не переусердствуйте с количеством клея. Лучше пользоваться прочным картоном или бумагой.
Простейший робот
Как сделать легкого робота в домашних условиях? Сложно создать полноценную автоматизированную машину, а вот минимальную конструкцию собрать все-таки можно. Рассмотрим простейший механизм, который, к примеру, сможет совершать определенные действия в одной зоне. Понадобятся следующие материалы:
Пара щеток среднего размера для чистки обуви.
Компьютерные вентиляторы в количестве двух штук.
Разъем для батарейки 9-в и сама батарея.
Хомут и стяжка с функцией защелкивания.
Просверливаем в тарелке для щеток два отверстия с одинаковым расстоянием. Крепим их. Щетки должны располагаться на одинаковом расстоянии от друг друга и середины тарелки. С помощью гаек прикрепляем к щеткам регулировочное крепление. В среднее расположение устанавливаем ползунки от креплений. Для движений робота необходимо использовать компьютерные вентиляторы. Они подключаются к батарейке и параллельно размещаются, чтобы обеспечить вращение машины. Это будет некий вибрационный моторчик. В завершение необходимо накинуть клеммы.
В данном случае не потребуется больших финансовых затрат или какого-либо технического или компьютерного опыта, ведь здесь подробно описано, как сделать робота в домашних условиях. Достать необходимые детали нетрудно. Для улучшения двигательных функций конструкции можно использовать микроконтроллеры или дополнительные моторчики.
Робот, как в рекламе
Наверно, многим знаком рекламный ролик браузера, в котором главным героем является небольшой робот, крутящийся и рисующий фломастерами фигуры на бумаге. Как сделать робота в домашних условиях из этой рекламы? Да очень просто. Для создания такой автоматизированной милой игрушки необходимо запастись:
- тремя фломастерами;
- плотным картоном или пластиком;
- моторчиком;
- круглой батарейкой;
- фольгой или изолентой;
- клеем.
Итак, создаем форму для робота из пластика или картона (точнее, вырезаем). Необходимо сделать треугольную форму с закругленными углами. В каждом уголке проделываем небольшое отверстие, в которое сможет пролезть фломастер. Одно отверстие делаем вблизи центра треугольника для моторчика. Получаем 4 отверстия по всему периметру треугольной формы.
Затем вставляем по очереди фломастеры в проделанные отверстия. К моторчику необходимо прикрепить батарейку. Сделать это можно с помощью клея и фольги или изоленты. Для того чтобы моторчик крепко держался на роботе, необходимо зафиксировать его небольшим количеством клея.
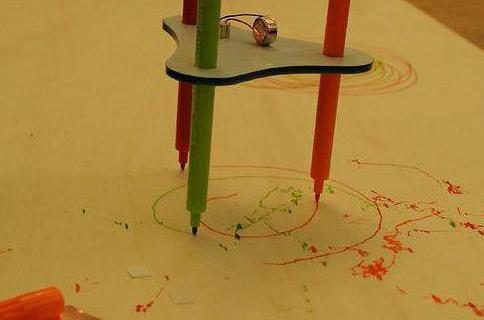
Робот будет двигаться лишь после присоединения второго проводка к закрепленной батарейке.
Робот из «Лего»
«Лего» — серия игрушек для детей, которая состоит в основном из деталей конструктора, соединяющихся в один элемент. Детали можно комбинировать, при этом создавая все новые и новые предметы для игр.
Собирать подобный конструктор любят практически все дети от 3 до 10 лет. В особенности детский интерес увеличивается, если из деталей можно собрать робота. Итак, чтобы собрать двигающиегося робота из «Лего», необходимо приготовить детали, а также миниатюрный мотор и блок управления.
К тому же сейчас продаются готовые наборы с деталями, позволяющие собрать самостоятельно любого робота. Главное — освоить приложенную инструкцию. К примеру:
- готовим детали, как указано в инструкции;
- прикручиваем колеса, если они есть;
- собираем крепления, которые будут служить поддержкой для моторчика;
- вставляем в специальный блок батарейку или даже несколько;
- устанавливаем двигатель;
- подключаем его к мотору;
- загружаем в память конструкции специальную программу, которая позволяет управлять игрушкой.
Казалось бы, робота собрать довольно сложно, а уж человеку без определенных знаний это вообще не удастся. Но это не так. Конечно трудно соорудить полноценную автоматизированную машину, но простейший вариант сделать может каждый. Достаточно прочитать нашу статью о том, как сделать робота в домашних условиях.
Как сделать робота своими руками

Необходимые материалы

1. Прикрепляем батарейку к мотору


2. Дестабилизатор

На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит нашему творению индивидуальности и увеличит амплитуду его движений.

3. Ноги




4. Провода

5. Подключение батарейки


6. Глаза

7. Запуск


А вот как может выглядеть наш самодельный робот, если проявить больше фантазии:


И напоследок видеоролик:
Забавная поделка, попробуем смастерить на досуге. Вот только где моторчик достать..
![]()
из старых игрушек можно выковырять, или в магазине радиодеталей посмотреть.
очень интересно принеприменно сделаю только где моторчик достать
и еще здесь и правда хоть вибро но настоящего робота ведь вы сделаете своими руками
А как создать подвижного динозавра-велоцираптора? В перьях и чтоб бегал и прыгал и глаза окрывал и звуки издавал и перьями шевелил. Как такого создать?
Ну, это надо быть гениальным мастером))))) а вот так ты его не создашь — купить проще)))))
а пенокартон обязателен?
![]()
подойдет и просто кусочек резины или другой похожий материал. В крайнем случае можно и без него обойтись, приклеить напрямую к моторчику.
А если на моторе уже есть похожая пипка, то ее нужно снять и поставить пенокартон? Или оставить можно?
![]()
Оставьте.. Если робот будет вяло двигаться, можете потом на неё ещё и пенокартон приклеить.
я сделал но она не работает
может вы неправильно сделали или батарейки старые
я уже сделал прикольный робот
а еще можно со старого телефона вибро вытащить и на одну щетку пресабачить))получится такой маленький а батарейку по меньше)
![]()
Отличная идея! Можно даже целый рой таких мелкороботов сделать ))
Я тоже собирал робота но откуда взять пенокортон
![]()
Вместо пенокартона отлично подойдет кусочек резины.. В принципе любой легкий материал можно попробовать взять на замену.
Ааа модно ещё вопросик из чиго сделать ноги нищитая из зубных щёток
![]()
Из канцелярских скрепок. На одной из последних фотографий есть такая модификация )
Извини. Последний вопрос. Как сделать чтобы ноги двигались? Каким образом подсоединить к шестеренке двигателя?
Не как ноги просто на термо клей клеются. Они не будут двигаться.
Они не двигаются! Этот робот движется за счет вибрации от двигателя. Вибрация появляется за счет куска пенокартона на оси и штучки на его конце.
Старая идея из советских журналов для самоделкиных. Только для того, что бы он не на месте крутился, нужно ворсинки щетки в кипятке загнуть в одну сторону(вперед или назад) слегка. Тогда робот будет ехать прямо, а не во все стороны
в наше время это называлось виброход!
Скажите пожалуйста какие провода нужны и где их взять?
![]()
да практически любые, ориентируйтесь на фото. Взять можно из любого неисправного устройства или попросить у кого-нибудь.
А если без клеющего пестолета то каким клеем приклееть
Это не робот , это моторчик с батарейкой 🙂
Сделал. Можно с коробка спичек сделать.:-)
Как можно сделать мини робот только он работает через WI-FI так можно или нет если бы работала то былобы круто с телефона можно
Собрал просто класс
На аликспрсе заказал моторчик. А батарейку не только эту можно брать! Взял на 12V у меня получилось
Я ожидал другое
В журнале Компьютерра была статья в которой описывался опыт с подобными роботами. Только этих роботов было очень много и они были маленькие. Питались от внешнего источника (типа беспроводной зарядки). При движении несколько сот таких роботов строили фигуры, двигались синхронно и много чего интересного. Ссылку дать не могу, статья была около года назад, а у них найти то что было неделю назад проблематично.
Статью нашел.
На счет нескольких сот оказывается преувеличил. Батарейка на борту есть. При поиске нашел видео с сотнями подобных роботов, работающих от солнечных батарей.
Десятка самодельных роботов
Обычно мы рассказываем о роботах, созданных различными научно-исследовательскими центрами или компаниями. Однако роботов с разной степенью успеха по всему миру собирают обычные люди. Итак, сегодня мы представляем вам десять самодельных роботов.
Немецкий студент-нейробиолог собрал андроида по имени Адам. Его имя расшифровывается как Advanced Dual Arm Manipulator или «усовершенствованный двуручный манипулятор». Руки робота обладают пятью степенями свободы. Их приводят в действие суставы Robolink немецкой компании Igus. Для вращения суставов Адама используются внешние тросы. Кроме того, на голове Адама установлено две видеокамеры, громкоговоритель, синтезатор речи, а также ЖК-панель, имитирующая движения губ робота.
Робот MPR-1 примечателен тем, что он сконструирован не из железа или пластика, как большинство его собратьев, а из бумаги. Как утверждает создатель робота художник Kikousya, материалы для MPR-1 – бумага, несколько дюбелей и пара резиновых лент. При этом робот уверенно двигается, хотя его механические элементы также сделаны из бумаги. Кривошипно-шатунный механизм обеспечивает движение ног робота, а его ступни созданы так, что их поверхность всегда находится параллельно полу.
Робот-папарацци Boxie
Робот Boxie создан американским инженером Александром Ребеном из Массачусетского технологического института. Boxie, похожий чем-то на героя известного всем мультфильма Валл-И, должен помочь сотрудникам средств массовой информации. Маленький и юркий папарацци полностью сделан из картона, передвигается он при помощи гусениц, а ориентируется на улице посредством ультразвука, что помогает ему преодолевать разнообразные препятствия. Интервью робот берет забавным детским голосом, а респондент в любой момент может прервать беседу, нажав на специальную кнопку. Boxie может записать около шести часов видео и отправить снятое своему хозяину, используя ближайшую точку Wi-Fi.
Morphex
Норвежский инженер Каре Халворсен создал шестиногого робота Morphex, который умеет превращаться в мяч и обратно. Кроме того, робот способен передвигаться. Движение робота происходит за счет двигателей, толкающих его вперед. Робот движется по дуге, а не по прямой линии. В силу своего дизайна Morphex не может самостоятельно исправить траекторию своего движения. В данный момент Халворсен работает над тем, чтобы решить данный вопрос. Ожидается любопытное обновление: создатель робота хочет добавить 36 светодиодов, которые позволили бы Morphex менять цвета.
Truckbot
Американцы Тим Хис и Райан Хикмен решили создать небольшого робота, в основе которого находится телефон Android. Созданный ими робот Truckbot довольно прост в плане его конструкции: телефон HTC G1 находится на верхушке робота, являясь его «мозгом». На данный момент робот умеет передвигаться по плоской поверхности, выбирать направления движения и сопровождать всяческими фразами столкновения с препятствиями.
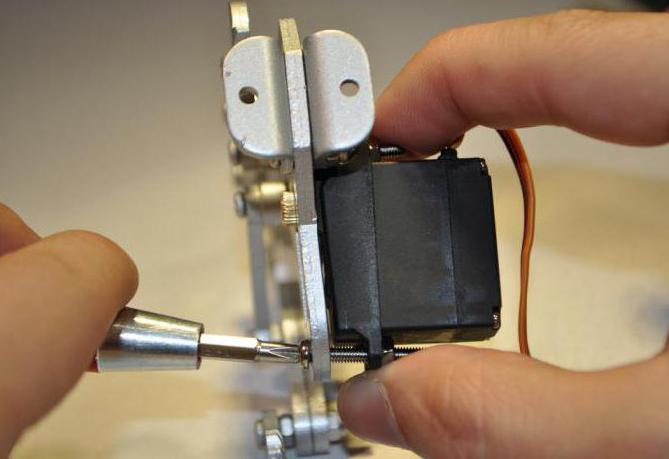
Робот-пайщик
Однажды американец Брайан Дори, занимающийся разработкой плат расширения, столкнулся со следующей проблемой: запаивать двухрядную гребенку пинов своими руками очень сложно. Брайану был необходим помощник, поэтому он решил создать робота, который умел бы паять. На разработку робота у Брайана ушло два месяца. Сделанный робот оборудован двумя паяльниками, которые могут запаивать два ряда контактов одновременно. Управлять роботом можно через ПК и планшет.
Mechatronic Tank
В каждой семье есть своё излюбленное хобби. Например, в семье американского инженера Роберта Битти конструируют роботов. Роберту помогают его дочери-подростки, а супруга и новорожденная дочь оказывают им моральную поддержку. Наиболее внушительное их творение – самоходная установка Mechatronic Tank. Благодаря 20-килограммовой броне этот робот-охранник – гроза любого преступника. Восемь эхолокаторов, установленных на башне робота, позволяют ему рассчитать дистанцию до объектов, находящихся в его поле зрения, с точностью до дюйма. Робот ещё стреляет металлическими пулями со скоростью в тысячу выстрелов в минуту.
Робособака
Американец по имени Макс создал мини-копию знаменитого робота-собаки от Boston Dynamics. Несущую конструкцию робота Макс сделал из обрезков пятимиллиметрового акрилового стекла, а для скрепления всех частей воедино им были использованы обычные резьбовые болты. Кроме того, при создании робота были использованы миниатюрные сервоприводы, отвечающие за движение его конечностей, а также детали из набора Arduino Mega, координирующие двигательный процесс механического пса.
Робот-шар
Робот-колобок был сконструирован Джеромом Демерсом, работает он на солнечных батареях. Внутри робота есть конденсатор, который соединен с деталями питания от солнца. Он нужен для накапливания энергии в непогоду. Когда солнечной энергии достаточно, шар начинает катиться вперед.
Роборука
Изначально преподавателем Технологического института Джорджии Джилом Вайнбергом была сконструирована роборука для барабанщика, которому ампутировали руку. Затем Джил создал автоматизированную технологию синхронизации, благодаря которой двурукий барабанщик мог бы пользоваться роборукой в качестве дополнительной руки. Роборука реагирует на манеру игры барабанщика, создавая свой собственный ритм. Также роборука умеет импровизировать, анализируя при этом ритм, в котором играет барабанщик.
Как сделать робот-пылесос своими руками — 2 идеи сборки



В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
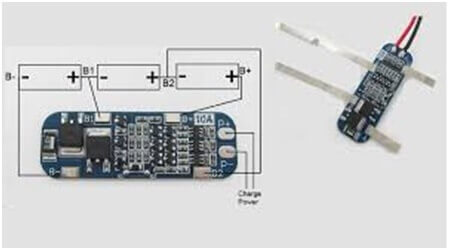
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
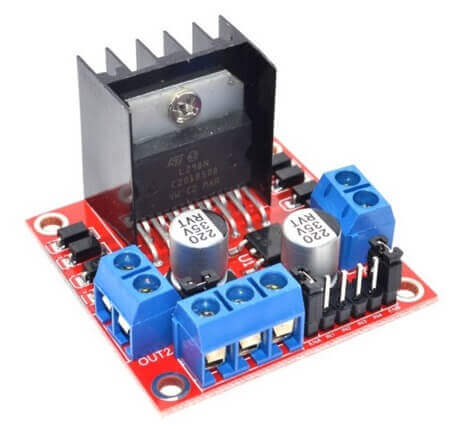
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
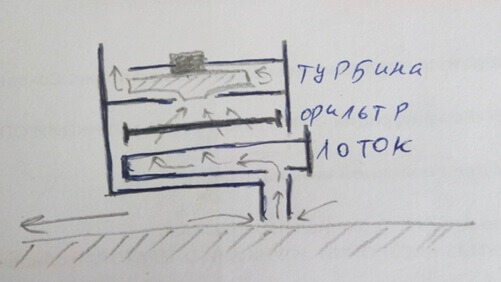
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
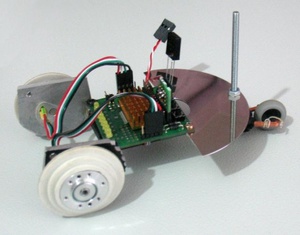
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
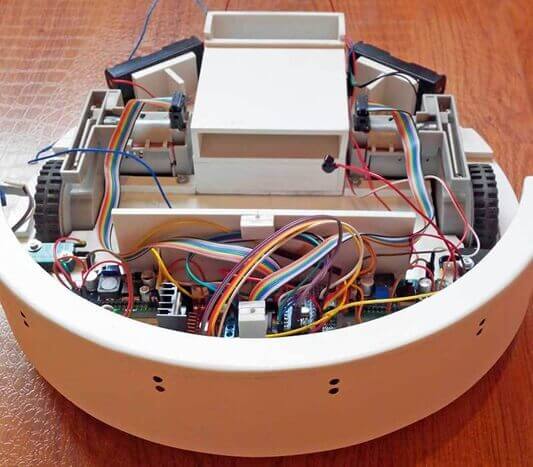
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
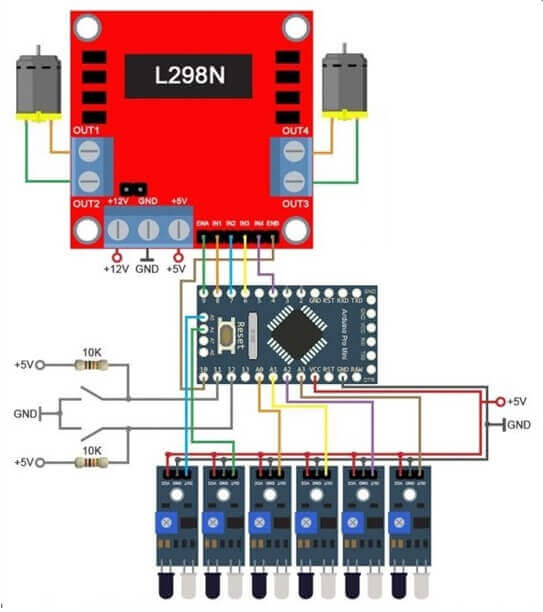
Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
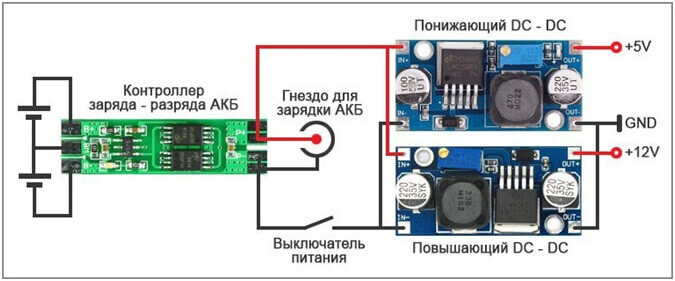
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.

Вот схема питания этого робота:
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
