

Принцип работы кулачкового механизма
Принцип работы кулачкового механизма
Теоретический профиль кулачка обычно представляется в полярных координатах зависимостью r i = f (di),
где r i — радиус-вектор текущей точки теоретического или центрового профиля кулачка.
Структура кулачковых механизмов

В кулачковом механизме с роликом имеется две подвижности разного функционального назначения: W0 = 1 — основная подвижность механизма по которой осуществляется преобразование движения по заданному закону, Wм = 1 — местная подвижность, которая введена в механизм для замены в высшей паре трения скольжения трением качения.
Кинематический анализ кулачкового механизмаКинематический анализ кулачкового механизма может быть проведен любым из описанных выше методов. При исследовании кулачковых механизмов с типовым законом движения выходного звена наиболее часто применяется метод кинематических диаграмм. Для применения этого метода необходимо определить одну из кинематических диаграмм. Так как при кинематическом анализе кулачковый механизм задан, то известна его кинематическая схема и форма конструктивного профиля кулачка. Построение диаграммы перемещений проводится в следующей последовательности (для механизма с внеосным поступательно движущимся толкателем):
- строится, касательно к конструктивному профилю кулачка, семейство окружностей с радиусом, равным радиусу ролика; соединяются центры окружностей этого семейства плавной кривой и получается центровой или теоретический профиль кулачка
- в полученный центровой профиль вписываются окружности радиусов r0 и r 0 + h Amax ,определяется величина эксцентриситета е
- по величине участков, не совпадающих с дугами окружностей радиусов r0 и r 0 + h Amax , определяются фазовые углы j раб , j у , j дв и j с
- дуга окружности r , соответствующая рабочему фазовому углу, разбивается на несколько дискретных участков; через точки разбиения проводятся касательно к окружности радиуса эксцентриситета прямые линии (эти линии соответствуют положениям оси толкателя в его движении относительно кулачка)
- на этих прямых измеряются отрезки расположенные между центровым профилем и окружностью радиуса r0; эти отрезки соответствуют перемещениям центра ролика толкателя SВi
по полученным перемещениям SВi строится диаграмма функции положения центра ролика толкателя SВi = f ( j 1 )

На рис. 17.4 показана схема построения функции положения для кулачкового механизма с центральным (е=0) поступательно движущимся роликовым толкателем.
Синтез кулачкового механизма. Этапы синтеза При синтезе кулачкового механизма, как и при синтезе любого механизма, решается ряд задач из которых в курсе ТММ рассматриваются две:
выбор структурной схемы и определение основных размеров звеньев механизма (включая профиль кулачка).
Первый этап синтеза — структурный. Структурная схема определяет число звеньев механизма; число, вид и подвижность кинематических пар; число избыточных связей и местных подвижностей. При структурном синтезе необходимо обосновать введение в схему механизма каждой избыточной связи и местной подвижности. Определяющими условиями при выборе структурной схемы являются: заданный вид преобразования движения, расположение осей входного и выходного звеньев. Входное движение в механизме преобразуется в выходное, например, вращательное во вращательное, вращательное в поступательное и т.п. Если оси параллельны, то выбирается плоская схема механизма. При пересекающихся или перекрещивающихся осях необходимо использовать пространственную схему. В кинематических механизмах нагрузки малы, поэтому можно использовать толкатели с заостренным наконечником. В силовых механизмах для повышения долговечности и уменьшения износа в схему механизма вводят ролик или увеличивают приведенный радиус кривизны контактирующих поверхностей высшей пары.
Второй этап синтеза — метрический. На этом этапе определяются основные размеры звеньев механизма, которые обеспечивают заданный закон преобразования движения в механизме или заданную передаточную функцию. Как отмечалось выше, передаточная функция является чисто геометрической характеристикой механизма, а, следовательно, задача метрического синтеза чисто геометрическая задача, независящая от времени или скоростей. Основные критерии, которыми руководствуется проектировщик, при решении задач метрического синтеза: минимизация габаритов, а , следовательно, и массы; минимизация угла давления в вышей паре; получение технологичной формы профиля кулачка.
Постановка задачи метрического синтеза
Дано:
Структурная схема механизма; закон движения выходного звена S B = f ( j 1)
или его параметры — h B , j раб = j у + j дв + j с , допустимый угол давления — |J|
Дополнительная информация: радиус ролика r р , диаметр кулачкового вала d в , эксцентриситет е (для механизма с толкателем движущимся поступательно), межосевое расстояние a w и длина коромысла l BC (для механизма с возвратно-вращательным движением выходного звена).
Определить:
радиус начальной шайбы кулачка r 0 ; радиус ролика r 0 ; координаты центрового и конструктивного профиля кулачка r i = f (di)
и, если не задано, то эксцентриситет е и межосевое расстояние a w .
Алгоритм проектирования кулачкового механизма по допустимому углу давления
1. Определение закона движения . Если в задании на проектирование не дан закон движения , то конструктор должен выбрать его и набора типовых
Кулачковые механизмы;
Широкое распространение в технике получили кулачковые механизмы. Кулачковые механизмы предназначены для преобразования вращательного движения ведущего звена (кулачка) в заведомо заданный закон возвратно-поступательного движения ведомого звена (толкателя). Широко применяются кулачковые механизмы в швейных машинах, двигателях внутреннего сгорания, автоматах и позволяют получить заведомо заданныйзакон движения толкателя, а также обеспечить временные остановы ведомого звена при непрерывном движении ведущего.
Простейший кулачковый механизм – трехзвенный, состоящий из кулачка, толкателя и стойки. Входным звеном чаще всего бывает кулачок. Кулачковые механизмы бывают как плоскими, так ипространственными.
Плоские кулачковые механизмы для удобства рассмотрения разобьем на механизмы в зависимости от движения выходного звена на два вида:
1.Кулачковый механизм с поступательно движущимся толкателем (ползуном).
2. Кулачковый механизм с поворачивающимся толкателем (коромыслом).
Пример первого кулачкового механизма показан на рис.1.23. Кулачок 1, вращаясь с заданной угловой скоростью, действует на ролик 3 и заставляет толкатель 2 в виде ползуна двигаться в направляющих возвратно-поступательно.
На рис.1.24 приведена схема кулачкового механизма с поворачивающимся толкателем (коромыслом). Кулачок 1, вращаясь с заданной угловой скоростью  , действует на толкатель 2 и заставляет последний вращаться вокруг оси вращения А.
, действует на толкатель 2 и заставляет последний вращаться вокруг оси вращения А.

Рис.1.23. Механизм с поступательно-движущимся толкателем
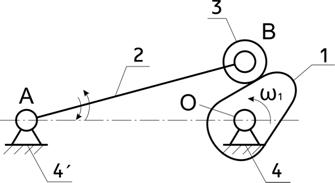
Рис.1.24. Кулачковый механизм с поворачивающимся толкателем
Кулачковые механизмы имеют разновидности в зависимости от геометрических форм элемента выходного (ведомого) звена и взаимного расположения толкателя и кулачка. Например, кулачковый механизм, показанный на рис.1.23 может иметь разные виды ведомых звеньев (рис.1.25).
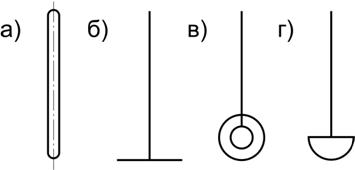
Рис.1.25. Виды ведомых звеньев, применяемые для кулачковых механизмов
с поступательно движущимся выходным звеном: а) толкатель с острием;
б) с плоскостью; в) толкатель с роликом; г) толкатель со сферическим наконечником.
Кулачковые механизмы с поступательно движущимся ведомым звеном можно разделить на:
кулачковые механизмы с центральным толкателем, у которых направление движения толкателя совпадает с осью вращения кулачка (рис.1.26);
кулачковые механизмы со смещенным толкателем (дезаксиальные), если ось толкателя отстоит на расстояние е– дезаксиал от оси вращениякулачка (рис.1.27).
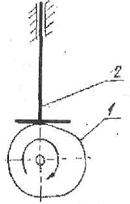
Рис.1.26. Кулачковый механизм с центральным толкателем
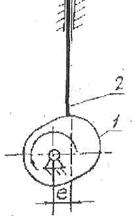
Рис.1.27.Кулачковый механизм со смещенным толкателем
При работе кулачковых механизмов необходимо, чтобы было постоянное соприкосновение ведущего и ведомого звеньев. Это может быть обеспечено либо силовым замыканием, чаще всего с помощью пружин (рис.1.28), либо геометрически, если выполнить профиль кулачка 1 в форме паза, боковые поверхности которого воздействуют на ролик 3 толкателя 2.
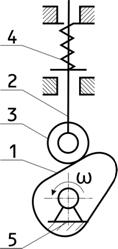
Рис.1.28. Кулачковый механизм с силовым замыканием
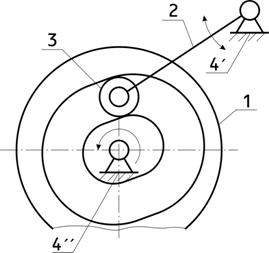
Рис.1.29. Кулачковый механизм с геометрическим замыканием
Пазовый кулачок обеспечивает геометрическое замыкание высшей пары кулачкового механизма (рис.1.29).
Все рассмотренные выше кулачковые механизмы плоские. Часто встречаются пространственные кулачковые механизмы, которые весьма разнообразны по конструктивному оформлению. Наиболее распространенными пространственными кулачковыми механизмами являются механизмы барабанного типа (рис.1.30). Цилиндрический кулачок 1 с профильным пазом, обеспечивающим кинематическое замыкание высшей пары, вращается с постоянной угловой скоростью и через ролик 3 сообщает качательное движение толкателю 2, закон изменения которого зависит от очертания паза.

Рис.1.30. Пространственный кулачковый механизм барабанного типа
Недостатки кулачковых механизмов: высокие удельные давления, повышенный износ звеньев механизма, необходимость обеспечения замыкания звеньев, что приводит к дополнительным нагрузкам на звенья и к усложнению конструкции.
Кулачковый механизм: схема, применение, эксцентриситет
Кулачковый механизм служит для преобразования вращательного движения в линейное перемещение малой амплитуды. Вращающаяся его деталь — диск с выступом, закрепленный на ведущем валу, называется кулачок при вращении выступ толкает либо толкатель, если необходимо получить поступательное перемещение, либо коромысло, если требуется качательное движение. Такие механизмы широко применяются в двигателях внутреннего сгорания, измерительных приборах, швейных машинках, различных регуляторах и многих других устройствах.

Кулачковые механизмы
Устройства применяются при необходимости преобразования вращения ведущего вала в линейное перемещение небольшой амплитуды. Основные элементы механизма следующие:
- ведущий вал;
- закрепленный на нем (или являющийся его частью);
- фасонный диск с выступом;
- толкатель, движущий в направляющих, обеспечивающих линейность его движения.
Фасонный диск (он называется также кулачком) – это активный элемент кинематической пары. Исполнительным элементом служит толкатель. Иногда движение передается через качающиеся на параллельном валу коромысло.
Одним из основных параметров у механизмов с толкателем является эксцентриситет — ось толкателя смещается относительно оси кулачка.

Принцип работы кулачкового механизма прост:
при вращении кулачка в плоскости толкателя он поворачивается своим сечением с большим радиусом, оказывая давление на толкатель и вынуждая его к линейному движению. Это перемещение происходит до тех пор, пока не будет достигнута вершина кулачка. После его прохождения давление на шток начинает ослабевать вплоть до достижения минимального радиуса диска. Шток возвращается обратно под действием пружины. Цикл повторяется.
Особенностью кулачковой пары является ее необратимость. Кривошипный механизм может преобразовывать движение в обе стороны. Так, в бензиновом или дизельном двигателе во время рабочего хода продольный ход поршня преобразуется во вращение коленвала. Во время такта выпуска накопленная инерция вращения маховика вращает коленвал, и кривошипный механизм превращает его в обратный ход поршня, вытесняющего остатки продуктов сгорания рабочей смеси из цилиндра.

Кулачковая пара такой обратимости не имеет, поскольку отсутствует жесткая связь между элементами. Толкатель совершает обратное перемещение под действием возвратной пружины.
Самым широко распространенным примером кулачкового механизма служит распределительный механизм в двигателе внутреннего сгорания. Кулачки распредвала напрямую или через коромысла открывают в определенном порядке клапаны цилиндров. Закрываются они возвратными пружинами.
Чтобы спроектировать действующее устройство, необходимо провести ряд расчетов, для синтеза кулачкового механизма построить передаточную диаграмму.
Виды кулачковых пар
Разработано множество различных видов кулачковых механизмов. Они объединяются по разным признакам.
По основной функции:
- приводящие исполнительный орган в движение по определенной траектории;
- обеспечивающие простое перемещение (линейное или качающее) толкателя на заданное расстояние.
По пространственной конфигурации:
- плоские, все траектории лежат в одной плоскости;
- пространственно кулачковый механизм, двигается по сложным траекториям.

По типу толкательного механизма различают:
По траектории его движения:
По траектории кулачка:
- линейная;
- качающееся;
- вращение (винтовое движение).
Кулачковый механизм с роликовым толкателем по признаку смещения осей подразделяется на:
- аксиальные (ось вращения диска находится в плоскости толкателя)
- дезаксиальные оси вращения и линия движения толкателя разнесены в пространстве.
Дистанцию такого разнесения называют дезаксиалом (e).

Кулачковые регулировочные механизмы часто строятся по дезаксиальной схеме.
Достоинства кулачковых механизмов
Основным преимуществом устройства считается его способность реализовать весьма сложные пространственные траектории движения толкателя. Кроме того, движение можно строго регулировать по временным фазам, зависящим от угла поворота ведущего вала. При этом конструкция его весьма проста в работе и обслуживании.
Такой функциональности весьма сложно, а в ряде случаев- просто невозможно достичь с применением других типов механических конструкций.
Еще одним важным преимуществом конструкции над, скажем, электронными системами управления с электрическим или гидравлическим приводом, является ее исключительная надежность. Это очень важно в тех конструкциях, где требуется достичь точного многократного повторения одних и тех же движений, таких, как двигатель или швейная машинка.
Недостатки кулачковых механизмов
Самым заметным минусом служит сложность и высокая себестоимость производства деталей механизма. Наиболее трудоемким является изготовление управляющего профиля. Технологический процесс начинается с отливки заготовки из высокопрочных стальных сплавов, обладающих особой устойчивостью к переменным механическим напряжениям, истиранию и перепадам температуры. Далее требуется провести высокоточную механическую обработку с последующей шлифовкой и полировкой поверхностей. Упрочнение рабочей поверхности достигается термообработкой и цементацией. Такие распредвалы или кулачки привода масляного насоса обходятся дорого, но зато смогут отработать сотни тысяч километров пробега.

Еще одним минусом считается небольшая нагрузка, которую может толкнуть толкатель. Это происходит из-за большого трения в сопряжении пары, кроме того, возникают значительные боковые нагрузки на шток. Этот недостаток ограничивает мощностные возможности исполнительного органа устройства.
Для борьбы с этим недостатком используют роликовый толкатель, размещенный на шариковом или игольчатом подшипнике. Для крупных двигателей с большим диаметром клапанов и мощными возвратными пружинам используют коромысленную схему. Разная длина плеч коромысла работают как рычажная система, трансформируя больший ход на одном плече в большее усилие на другом.
Основные параметры кулачкового механизма
Наиболее важными параметрами устройства, определяющими его рабочие качества, служат:
- наибольший ход толкателя (ход плеча коромысла);
- наибольшая скорость поступательного перемещения;
- траектория исполнительного органа.
Кроме того, в расчете участвуют и такие характеристики, как:
- скорость вращения приводного вала;
- заданное усилие на исполнительном органе;
- период работы, у большинства схем принимается равным полному обороту вала (2π);
- фазовыми углами Θ
Фазовые углы различаются на следующие:
- фаза удаления Θу – угол, при повороте вала на который происходит максимальное перемещение толкателя между его крайними положениями;
- фаза верхнего стояния Θв.в- угол максимального удаления толкателя от оси кулачка;
- фаза сближения Θс соответствует перемещению толкателя из дальнего в ближнее положение, противоположна по смыслу фазе удаления, но не обязательно равна ей по величине;
- фаза нижнего стояния Θ н.в — соответствует минимальному удалению и по смыслу противоположна Θ в.в.
Если сложить все фазовые углы, должна получиться полная окружность
Θ = Θу + Θв.в + Θс + Θн.в =2π.
Рабочий ход складывается из первых трех фаз:
Холостой ход образуется из фазы нижнего стояния:
Каждой фазе работы ставится в соответствие один из профильных углов Σ: Σу; Σв.в; Σс; Σн.в.
Обычно фазовый и профильный угол для каждого состояния не равны между собой
Расчет кинематики кулачкового устройства базируется на линейных и угловых размерах его компонентов. Соотношение между ними называют законом выходного звена кинематической схемы.
Его выражают как функцию от текущего угла поворота вала, он учитывает все свойства структуры системы и ее проектных характеристик:
S =f(Θ), где Θ – угол поворота ведущего вала.
Закон выходного звена можно получить двумя методами:
Расчетно-аналитический способ существенно более точен, но требует сложных расчетов. Его используют как основной при проектировании ответственных механизмов.
Графоаналитический способ вычисления закона проще в исполнении и значительно более нагляден. Его используют для простых устройств и как способ предварительной оценки пред проведением расчетно- аналитических вычислений.
С развитием средств вычислительной техники и программного обеспечения сложности расчетно- аналитического метода отошли в прошлое. Средства трехмерного параметрического моделирования и кинематической симуляции, предлагаемые всеми ведущими производителями программных продуктов семейства CAD- CAE, позволяют одновременно проводить графическое моделирование и аналитические расчеты, существенно облегчая работу конструктора.
Классический графоаналитический способ реализуется:
- построением кинематических диаграмм;
- формированием кинематических планов с применением заменяющего механизма.

Чертеж его представляет собой упрощенную модель, содержащую лишь низшие пары. Их отличительное свойство заключается в том, что они обладают в фиксированных положениях ведущего звена теми же значениями координат, скорости и ускорения, как и у моделируемых ими компонентов высшей пары.
Во время построения упрощенной модели следует следить за тем, чтобы сохранялись законы движения ведущего и ведомого элементов кулачкового устройства, а также относительное положение их осей.
Пара высшего порядка моделируется связанной двойкой низших пар. Вследствие этого в схеме возникает фиктивное третье звено, а вместо схемы кулачковых механизмов подставляют эквивалентную схему рычажной системы.
Обычно функция движения выходного звена имеет вид второй производной расстояния по углу положения вала либо по времени. Тогда она имеет физический смысл ускорения, и для графического моделирования применяют способ построения кинематических диаграмм.
Назначение и область применения
Кулачковый механизм превращает вращение в линейное перемещение малой амплитуды. На практике это короткое линейное движение используется для выполнения следующих операций:
- сцепление или расцепление частей механизма;
- открытие или закрытие клапана;
- возвратно- поступательно движение какого-либо исполнительного органа изделия;
- повторение исполнительным органом наперед заданной в конфигурации поверхности кулачка сложной пространственной траектории.

Эти операции находят применение в следующих устройствах и системах:
- управление клапанами двигателей внутреннего сгорания;
- топливные и масляные насосы;
- приводы гидравлических и пневматических тормозных систем;
- распределитель зажигания в устаревшем карбюраторном двигателе;
- привод перемены передач в трансмиссиях мотоциклов и другого двухтактного транспорта;
- швейные машины;
- музыкальные механизмы: механический орган, шарманка, шкатулка и т. п.;
- транспортно- технологические машины;
- таймеры с механическим приводом;
- сельскохозяйственные механизмы, комбайны, осуществляющие уборку и сортировку корнеплодов или злаков;
Кроме того, широчайшая область использования кулачковых пар лежит там, где требуется не погасить, а, наоборот, создать вибрацию. Они находят применение в вибромашинах, служащих для уплотнения грунта или бетонных полов в строительстве. Горная техника, используемая при добыче рудных материалов, также производит сортировку тонких фракций на вибростолах, приводимых в движение кулачковыми парами.
Еще одна важная сфера применения – точные измерительные приборы и средства механической и электромеханической автоматизации. Контактный манометр и многие другие прецизионные приборы широко используют кулачковые пары для передачи вращения стрелки на шток, замыкающий контактные группы.
Используются кулачковые устройства в малых и средних металлообрабатывающих станках для переключения передач, периодического перемещения рабочих органов.
В производственных технологических установках в химической, пищевой и фармацевтической промышленности устройства используются для дозированной подачи сыпучего сырья к месту дальнейшей переработки.
Несмотря на стремительное совершенствование электронных средств управления, старая проверенная кулачковая пара уверенно удерживает свои позиции там, где требуется многократно повторять однообразные движения с высокой точностью.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Назначение кулачковых механизмов, их классификация, область применения и особенности
Лекция 4
Проектирование и исследование кулачковых механизмов
Цель: ознакомить студентов с назначением, областью применения и классификацией кулачковых механизмов, методикой проектирования и кинематического анализа кулачковых механизмов.
План:
- Назначение кулачковых механизмов, их классификация, область применения и особенности.
- Параметры кулачкового механизма.
3. Кинематический анализ плоских кулачковых механизмов.
4. Синтез кулачковых механизмов:
4.1. Определение закона движения ведомого звена.
4.2. Определение радиуса базовой поверхности кулачка для различных кулачковых механизмов по углу давления и из условия выпуклости профиля.
4.3. Определение радиуса ролика
4.4. Получение теоретического и практического профиля кулачка для различных типов кулачковых механизмов с поступательно движущимся (плоским, роликовым, острым) и качающимся (роликовым, плоским) толкателем.
Назначение кулачковых механизмов, их классификация, область применения и особенности
Кулачковым называется трехзвенный механизм с высшей кинематической парой, входное звено которого называется кулачком, а выходное — толкателем (или коромыслом). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено — ролик и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью.
Кулачковые механизмы предназначены для преобразования вращательного или поступательного движения кулачка в возвратно-вращательное или возвратно-поступательное движение толкателя.
Достоинства кулачковых механизмов:
o Возможность воспроизведения практически любого закона движения толкателя, обеспечение точных выстоев ведомого звена.
o Простота устройства и удобство технического обслуживания.
o Малые габариты при сложных законах движения.
o Большое удельное давление в точке контакта кулачка с толкателем, что может привести к выкрашиванию материалов (питтинг).
o Необходимость обеспечения замыкания высшей пары.
o Сложность изготовления кулачка.
Эти преимущества определили их широкое применение в измерительных приборах и машинах автоматического или полуавтоматического действия и обеспечивают функции “жёсткого” управления выполняемым процессом.
Классификация кулачковых механизмов:
Кулачковые механизмы классифицируются по следующим признакам:
- по расположению звеньев в пространстве (пространственные, плоские)
- по движению кулачка (вращательное, поступательное, винтовое)
- по движению выходного звена (возвратно-поступательное (с толкателем), возвратно-вращательное (с коромыслом))
- по наличию ролика (с роликом, без ролика)
- по виду кулачка )дисковый (плоский), цилиндрический, коноид (сложный пространственный))
- по форме рабочей поверхности выходного звена (плоская, заостренная, цилиндрическая, сферическая)
- по способу замыкания элементов высшей пары (силовое, геометрическое)
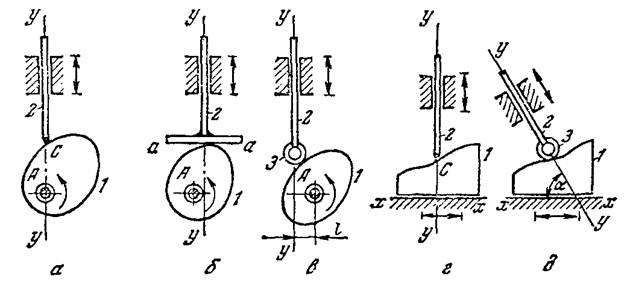
Рис. 4.1. Плоские кулачковые механизмы с поступательным толкателем
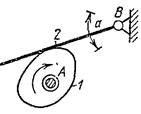
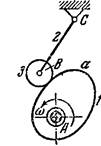
Рис. 4.2. Плоские кулачковые механизмы с вращающимся толкателем (коромыслом)
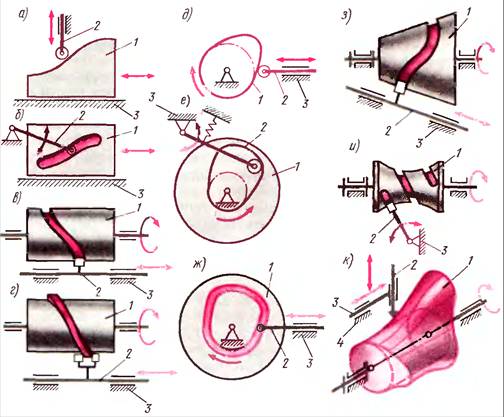
Рис. 4.3. Примеры кулачковых механизмов
При силовом замыкании (рис. 4.4) удаление толкателя осуществляется воздействием на него контактной поверхности кулачка (ведущее звено ‑ кулачок, ведомое ‑ толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины или веса толкателя, при этом кулачок не является ведущим звеном. При геометрическом замыкании (рис.4.5) движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении ‑ воздействием внутренней рабочей поверхности кулачка на толкатель. На обеих фазах движения кулачок ведущее звено, толкатель — ведомое.
Кулачковые механизмы, часть 1 Типы кулачковых механизмов
Описание
Кулачковые механизмы. Чаcть 1.
Типы кулачковых механизмов
Кулачковые механизмы находят достаточно широкое применение в различных отраслях промышленности. В автомобилестроении, в двигателях внутреннего сгорания применяются кулачковые механизмы с тарельчатым толкателем и силовым замыканием пружиной. В технологическом оборудовании (в пружинонавивочных и шайбонавивочных станках, универсально гибочных и холодноштамповочных автоматах) применяются кулачковые механизмы с плоскими дисковыми кулачками, качающимся роликовым толкателем и силовым или кинематическим (при высоких скоростях и больших знакопеременных нагрузках) замыканием. В пищевой, легкой промышленности и производстве медикаментов, где используются роторные автоматы и линии применяются кулачковые механизмы с пространственными кулачками, с поступательно перемещающимися роликовыми толкателями и кинематическим замыканием.
Кулачковые механизмы в отличие от всех других содержат кулачок, задающий закон движения, и толкатель, передающий это движение ведомому звену – рычагу, ползуну, коромыслу или кулисе. Именно возможность осуществить движение ведомого звена практически по любому закону является основным преимуществом кулачкового механизма, что позволяет его использовать, в отличие от других механизмов, для решения сложных кинематических задач даже при работе в условиях больших нагрузок и высоких скоростей. До появления системы электронного программного управления кулачковые механизмы были практически единственным устройством, с помощью которого программировалось сложное движение исполнительного органа. Но и сейчас есть области техники, где кулачковые механизмы незаменимы, это например кулачковые автоматы различного назначения, работающие в условиях высоких скоростей и больших нагрузок (холодновысадочные автоматы, листоштамповочные автоматы, роторные линии), а также двигатели внутреннего сгорания (система газораспределения) и т.д.
Кулачковые механизмы различаются по виду движения толкателя, по типу кулачка, по конструкции толкателя, по способу замыкания кулачка и толкателя. По виду движения толкателя кулачковые механизмы делятся на механизмы с поступательным движением толкателя (см. Рис. 1а), с качательным движением толкателя (см. Рис. 1б) и механизмы со сложным движением толкателя (см. Рис. 1в).
 В кулачковых механизмах применяются следующие конструкции толкателей: игольчатые (см. Рис. 2а), роликовые (см. Рис. 2б), тарельчатые (см. Рис. 2в), сферические (см. Рис. 2г). В технологическом оборудовании обычно применяются роликовые толкатели.
В кулачковых механизмах применяются следующие конструкции толкателей: игольчатые (см. Рис. 2а), роликовые (см. Рис. 2б), тарельчатые (см. Рис. 2в), сферические (см. Рис. 2г). В технологическом оборудовании обычно применяются роликовые толкатели.
 По типу кулачка кулачковые механизмы делятся на механизмы с плоскими дисковыми кулачками (см. Рис. 3а,б), с поступательно движущимися кулачками (см Рис. 3в), с пространственными кулачками (см Рис. 3г).
По типу кулачка кулачковые механизмы делятся на механизмы с плоскими дисковыми кулачками (см. Рис. 3а,б), с поступательно движущимися кулачками (см Рис. 3в), с пространственными кулачками (см Рис. 3г).
 По способу замыкания кулачка и толкателя кулачковые механизмы делятся на механизмы с силовым замыканием (см. Рис. 4а) и механизмы с кинематическим замыканием (см. Рис. 4б).
По способу замыкания кулачка и толкателя кулачковые механизмы делятся на механизмы с силовым замыканием (см. Рис. 4а) и механизмы с кинематическим замыканием (см. Рис. 4б).
 В первом случае силовое замыкание кулачка и тарельчатого толкателя, обеспечивающее их постоянный гарантированный контакт, осуществляется за счет прижима последнего пружиной к кулачку, а во втором случае замыкание роликового толкателя и кулачка, обеспечивающего их постоянный контакт, осуществляется за счет того, что кулачок выполняется сдвоенным и имеет прямой и обратный профиль, а толкатель представляет собою трехплечий рычаг, два ведущих плеча которого оснащены шарнирно установленными роликами, каждый из которых контактирует с соответствующим профилем кулачка. Кроме того с кинематическим замыканием выполняются практически все пространственные кулачковые механизмы (см. Рис. 3г) и достаточно часто кулачковые механизмы с поступательно движущимся толкателем (см. Рис. 3в), при этом в обоих случаях кулачки выполняются с пазом по которому в процессе движения кулачка катится ролик толкателя. Необходимо отметить, что при видимых преимуществах использования кинематического замыкания в кулачковых механизмах высокоскоростного технологического оборудовании влечет за собою значительное ужесточение требований по точности предъявляемых к кулачку, толкателю и расточкам в станине под кулачковый вал и ось качания толкателя. Рассмотрим примеры и конструктивные особенности кулачковых механизмов.
В первом случае силовое замыкание кулачка и тарельчатого толкателя, обеспечивающее их постоянный гарантированный контакт, осуществляется за счет прижима последнего пружиной к кулачку, а во втором случае замыкание роликового толкателя и кулачка, обеспечивающего их постоянный контакт, осуществляется за счет того, что кулачок выполняется сдвоенным и имеет прямой и обратный профиль, а толкатель представляет собою трехплечий рычаг, два ведущих плеча которого оснащены шарнирно установленными роликами, каждый из которых контактирует с соответствующим профилем кулачка. Кроме того с кинематическим замыканием выполняются практически все пространственные кулачковые механизмы (см. Рис. 3г) и достаточно часто кулачковые механизмы с поступательно движущимся толкателем (см. Рис. 3в), при этом в обоих случаях кулачки выполняются с пазом по которому в процессе движения кулачка катится ролик толкателя. Необходимо отметить, что при видимых преимуществах использования кинематического замыкания в кулачковых механизмах высокоскоростного технологического оборудовании влечет за собою значительное ужесточение требований по точности предъявляемых к кулачку, толкателю и расточкам в станине под кулачковый вал и ось качания толкателя. Рассмотрим примеры и конструктивные особенности кулачковых механизмов.
Примеры использования кулачковых механизмов
При практическом применении кулачковых механизмов для выполнения определенных требований и ограничений зачастую приходится создавать оригинальные конструктивные схемы, которые позволяют повысить эффективность работы механизма в целом.
Кулачковые механизмы, которые, как правило, используются совместно с рычажным передаточным механизмом, образуют, таким образом, кулачково- рычажный механизм, который, работая в составе технологического оборудования автоматического действия (в составе станков – автоматов) зачастую оснащается дополнительными устройствами для выполнения следующих функций:
− изменение величины хода выходного звена,
− изменения цикла и работы механизма,
− предохранения наиболее ответственных деталей механизма от перегрузки,
− обеспечения удобства эксплуатации и наладки оборудования,
− включения и выключения привода механизма, при работе оборудования в холостом или наладочном режиме.
Рассмотрим конструктивные особенности кулачковых механизмов технологического оборудования имеющих различное функциональное назначение.

На Рис 15 показан кулачково – рычажный механизма выталкивания из матриц многопозиционного холодновысадочного автомата, который включает устройство для предохранения от перегрузки. Он содержит кулачок 1, установленный на приводном валу 2 автомата, который контактирует с роликом 6, шарнирно установленным на ведущем плече 7 ведущего рычага посредством подшипника скольжения 5 и оси 4 и роликом 3 шарнирно установленным посредством оси 36 на коромысле 33 возвратного механизма. При этом ведущий рычаг шарнирно установлен в станине 41 посредством подшипника скольжения 8 и оси 9, а на его ведомом плече имеющим радиусную форму выполнен закрытый ступенчатый паз, в котором с возможностью перемещения в процессе наладки расположена ползушка 11, цилиндрический хвостовик 12 которой с резьбой на конце фиксируется гайкой 13. В отверстии ползушки 11 установлена ось 14, с помощью которой она шарнирно соединяется с промежуточной тягой, имеющей сборную конструкцию и состоящей из ведущей 15 и ведомой 16 частей, шарнирно соединенных между собою посредством оси 17 и зафиксированных от относительного проворота при работе механизма в нормальном силовом режиме разрывном болтом 38. В свою очередь, ведомое плечо 16 промежуточной тяги шарнирно соединено с толкателем 23 и промежуточным коромыслом 20 посредством оси 18, зафиксированной от проворота в нем с помощью конического штифта 19, при этом, промежуточное коромысло 20, шарнирно установлено на станине 41 посредством подшипника скольжения 21 и оси 22. Толкатель 23 имеющий внутреннюю сферическую поверхность посредством прижимной планки 24 шарнирно соединен с ответной сферической поверхностью штанги 25, связанной непосредственно с выталкивателем из матриц (на Рис. 36 не показан) и имеющей возможность поступательного перемещения в направляющей втулке 26, установленной в станине 41. Механизм выталкивания снабжен возвратным механизмом, обеспечивающим постоянное усилие прижима ролика 6 к рабочей поверхности кулачка 1. Он состоит из штока 27, шарнирно соединенного посредством оси 30 с плечом 7 ведущего рычага, на котором установлена возвратная пружина сжатия 31, правый торец которой упирается в соответствующий торец стакана 29, а левый в поршень 28 закрепленный на штоке 27. При этом, стакан 29 с помощью оси 32 шарнирно соединен с коромыслом 33 на котором посредством оси 36 установлен ролик 3, контактирующей с кулачком 1, а коромысло 33 шарнирно установлено на станине 41 посредством оси 34 и кронштейна 35. Шарнирное соединение стакана 29, в котором расположена пружина 31 с коромыслом 33 оснащенным роликом 3, находящемся в постоянном контакте с кулачком 1 в противофазе с роликом 6 ведущего рычага, позволяет увеличить долговечность пружины 31 за счет уменьшения ее хода, что очень существенно для данного механизма.
Наличие в механизме промежуточного коромысла 20 позволяет разгрузить штангу 25 от нагрузок, действующих на штангу 23 в направлении перпендикулярном ее перемещению. Предохранение от перегрузки механизма обеспечивается за счет конструкции сборной промежуточной тяги, состоящей из ведущей 15 и ведомой 16 частей, соединенных разрывным болтом 38, который при увеличении усилия, действующего на тягу, выше допустимого разрывается и ведущая 15 и ведомая 16 части тяги поворачиваются друг относительно друга на оси 17, что приводит к прекращению передачи усилия тягой. При этом срабатывает конечный выключатель 39, на который воздействует флажок 40 и подает сигнал в систему электроавтоматики оборудования, что приводит к его остановке.
В полной версии статьи содержится 15 примеров конструктивного исполнения различных кулачковых механизмов
(см. Рис. в таб.) с описанием их работы

ЛИТЕРАТУРА.
1. Игнатьев Н. П. Основы проектирования Азов 2011г.
2. Игнатьев Н. П. Проектирование механизмов Азов 2015г.
Полная версия статьи содержит 23 страницы текста и 22 рисунка.
Для приобретения полной версии статьи добавьте её в корзину,
Стоимость полной версии статьи 120 рублей.
Кулачковый механизм



Кулачко́вый механи́зм — механизм, образующий высшую кинематическую пару, имеющий подвижное звено, совершающее вращательное движение, — кулак (кулачок), с поверхностью переменной кривизны или имеющей форму эксцентрика, взаимодействующей с другим подвижным звеном — толкателем, если подвижное звено совершает прямолинейное движение, или коромыслом, если подвижное звено совершает качание. Кулак, совершающий прямолинейное движение, называется копиром.
Содержание
Классификация
Кулачковые механизмы подразделяют на 4 группы:
- По типу толкателя:
- с плоским толкателем,
- с роликовым (на рисунке),
- с игольчатым,
- с остроконечным.
- По характеру движения толкателя:
- возвратно-поступательное (на рисунке),
- качающееся.
- По характеру движения кулачка:
- возвратно-поступательное,
- качающееся,
- вращающееся (на рисунке).
- Кулачковые механизмы с роликовым толкателем бывают:
- дезаксиальные (ось кулачка не под толкателем),
- центральные (ось кулачка под толкателем) (на рисунке).
Основные характеристики кулачкового механизма — это максимальное перемещение толкателя (угол качания коромысла), максимальная скорость или ускорение исполнительного механизма и закон движения исполнительного механизма.
Кулачковый механизм имеет сходные черты с механизмом планшайба-стержни
Применения
Кулачковый механизм применяется в двигателях внутреннего сгорания в газораспределительном механизме, в металлорежущих станках и других машинах для воспроизведения сложной траектории движения рабочих органов и выполнения функций управления, таких как включение и выключение рабочих органов по определённой схеме.
См. также
- Кулак (техника)
Литература
- Под ред. А. Ю. Ишлинского. Новый политехнический словарь. — М .: Большая Российская энциклопедия, 2003. — С. 671. — ISBN 5-7107-7316-6
Wikimedia Foundation . 2010 .
Смотреть что такое «Кулачковый механизм» в других словарях:
КУЛАЧКОВЫЙ МЕХАНИЗМ — механизм, подвижное звено которого (кулак) взаимодействует с другим подвижным звеном (толкателем). Кулачковый механизм осуществляет почти любой (заранее заданный) закон движения … Большой Энциклопедический словарь
Кулачковый механизм — механизм, в состав которого обычно входят два подвижных звена кулачок и толкатель и неподвижное звено стойка; К. м. осуществляют почти любой практически требуемый закон движения ведомого звена толкателя при непрерывном движении ведущего… … Большая советская энциклопедия
КУЛАЧКОВЫЙ МЕХАНИЗМ — механизм, подвижное звено к рого (кулак; или кулачок), имеющее поверхность перем. кривизны, взаимодействует с др. подвижным звеном (толкателем, или штангой), образуя высшую кинематическую пару. К. м. осуществляет почти любой (заранее заданный)… … Большой энциклопедический политехнический словарь
кулачковый механизм — Механизм, в состав которого входит кулачок. [Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно технической терминологии. 1984 г.] Тематики теория механизмов и машин Обобщающие термины виды… … Справочник технического переводчика
КУЛАЧКОВЫЙ МЕХАНИЗМ — кинематическая система тел (звеньев), подвижное звено которой ( (см.)), взаимодействуя с др. рабочим звеном (толкателем, штангой), позволяет изменять его движение соответственно заданному условию. Это свойство К. м. обеспечило его широкое… … Большая политехническая энциклопедия
кулачковый механизм — механизм, подвижное звено которого (кулак) взаимодействует с другим подвижным звеном (толкателем). Кулачковый механизм осуществляет почти любой (заранее заданный) закон движения. * * * КУЛАЧКОВЫЙ МЕХАНИЗМ КУЛАЧКОВЫЙ МЕХАНИЗМ, механизм, подвижное… … Энциклопедический словарь
кулачковый механизм — Механизм, в состав которого входит кулачок … Политехнический терминологический толковый словарь
кулачковый механизм — cam mechanism Механизм, содержащий по крайней мере один кулачок. Шифр IFToMM: 1.3.39 Раздел: СТРУКТУРА МЕХАНИЗМОВ … Теория механизмов и машин
КУЛАЧКОВЫЙ МЕХАНИЗМ — кинематическая пара, применяемая для преобразования вращения в заданный вид движения или изменение положения перемещаемых деталей. Представляет собой комбинацию асимметричных дисков или цилиндров; используется в различных механизмах, станках и… … Энциклопедия Кольера
Механизм Ватта — (анимация). См. также Лемниската Бернулли Механизм Уатта (механизм Ватта, параллелограмм Ватта) изобретён Джеймсом Уаттом (19 января 1736 25 августа 1819) для придания поршню паровой машины прямолинейного движения. Этот ме … Википедия
