

Параметры трехфазного асинхронного двигателя
Параметры асинхронного двигателя

Для того чтобы определить возможности и способ применения асинхронного двигателя, необходимо знать его характеристики. Полный список параметров можно найти в справочнике, каталоге или обратиться на завод изготовитель. Наиболее важные данные приводятся в паспорте двигателя. Паспорт, часто его называют «шильдик», двигателя представляет собой небольшую металлическую табличку, прикрепленную к корпусу двигателя.
Номинальные параметры двигателя это параметры, которые двигатель сможет выдерживать в течении всего срока эксплуатации. К номинальным (паспортным) данным двигателя относятся:
- Мощность на валу или механическая Рн;
- Напряжение обмотки статора Uн;
- Ток статора Iн;
- Частота напряжения сети fн;
- Частота или скорость вращения ротора nн, об/мин;
- Номинальный КПД ηн;
- Коэффициент мощности cos φн;
В паспорте АД обычно приводят два значения напряжения, например 380/220 В. Меньшее значение напряжения (220 В) это фазное напряжение обмотки статора. Большее значение напряжения относится к соединению обмотки статора в звезду, меньшее в треугольник. Соответственно указывают два значения тока статора. В каталогах приводят также:
- Кратность пускового тока Iп/Iн;
- Кратность пускового момента μп= Мп/Мн;
- Кратность максимального момента μм = Mм/Мн;
Кратность максимального момента называется перегрузочной способностью двигателя. Для АД с фазным ротором указывают на паспорте также напряжение между контактными кольцами при разомкнутой обмотке ротора U2н и номинальный ток в обмотке ротора I2н. Величина, характеризующая степень отставания скорости вращения ротора АД n от синхронной скорости n1 называется скольжением.

Скольжение иногда выражают в процентах:

Скорость вращения ротора, об/мин:

Номинальной скорости вращения двигателя nн соответствует номинальное скольжение Sн, которое составляет несколько процентов. Следовательно, скорость вращения ротора в номинальном режиме весьма близка к синхронной. Приведем для примера соотношения синхронной и номинальных скоростей серийных двигателей n1/n : 3000/2970, 1500/1460, 1000/970 и т.д. Частота электродвижущей силы ЭДС, наведенной в роторе, и тока ротора, Гц:

Если обмотки статора и ротора имеют соответственно числа витков W1, и W2 и обмоточные коэффициенты K1, и K2, то для ЭДС получим следующие соотношения:
для ЭДС, наведенной в обмотке статора, В:

для ЭДС, наведенной в обмотке ротора в момент пуска, В:

для ЭДС, наведенной в обмотке ротора при его вращении, В:

Как видно из последнего соотношения, чем выше скорость вращения ротора (т.е. чем меньше скольжение), тем меньше ЭДС, наводимая в его обмотке. И напротив, наибольшая ЭДС наводится в роторе в момент пуска, когда ротор еще неподвижен, а скольжение равно 1. Этому режиму соответствует пусковой ток, который превышает номинальный ток серийных АД в 5-7 раз.
Двигатель, подключенный к сети, потребляет из нее активную и реактивную мощности. Активная мощность идет на создание полезной механической мощности на валу и покрытие потерь в двигателе: на нагрев обмоток, потери в стали, механические потери.
Активная мощность двигателя, Вт:

Механическая мощность на валу двигателя, Вт:

Где М — вращающий момент двигателя.
Реактивная мощность двигателя идет на намагничивание машины или создание вращающегося магнитного поля, вар:
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей





1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Поделиться в социальных сетях
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» .
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Исходные данные: Требуется обеспечить питание двух трансформаторов ТМ-4000/10 от подстанции. Линия.

В наше время все большей популярностью пользуются автоматические выключатели (АВ) как иностранных так.
![]()
Выбор мощности трансформатора собственных нужд 6(10)/0,4 кВ строго соответствует методике расчета.
![]()
В данной статье будет рассматриваться расчет объема маслоприемника без отвода масла для.

В данной статье речь пойдет о принципе действия и из каких составных частей состоит УЗО. Устройство.
Отправляя сообщение, Вы разрешаете сбор и обработку персональных данных.
Политика конфиденциальности.
Расчет параметров трехфазного асинхронного двигателя
Трехфазный асинхронный двигатель с коротко-замкнутым ротором серии 4А имеет технические данные, приведенные в табл. 4. Определить высоту оси вращения h, число полюсов 2р, скольжение при номинальной нагрузке sH0M, момент на валу Мном, начальный пусковой Мп и максимальный
М max моменты, номинальный и пусковой токи IH0M и Iп в питающей сети при соединении обмоток статора звездой и треугольником.
Асинхронный трехфазный двигатель с короткозамкнутым ротором марки А02-82-6 имеет следующие паспортные данные: напряжение
U=220 /380 В, номинальная мощность Р2 = 40 кВт, частота вращения п2=980 об/мин, КПД η=91,5%, коэффициент мощности cos φ=0,91, кратность пускового тока КI = 5, кратность пускового момента KM = l,l, перегрузочная способность двигателя λ= 1,8. Определить число пар полюсов, номинальное скольжение, номинальные максимальный и пусковой вращающие моменты, номинальный и пусковой токи двигателя при соединении обмотки статора в «треугольник» и «звезду». Возможен ли пуск нагруженного двигателя, если подводимое напряжение на 10% ниже номинального и пуск производится переключением обмоток статора со «звезды» на «треугольник» от сети с напряжением U=220. В?
Решение. Для определения числа пар полюсов можно воспользоваться маркировкой двигателя, частотой вращения магнитного поля или ротора.
Если известна маркировка, то последнее число в марке двигателя означает количество полюсов. В данном двигателе шесть полюсов; следовательно, три пары. При известной частоте вращения магнитного поля число пар полюсов определяем по формуле
По этой же формуле определяем число пар полюсов, если задана частота вращения ротора, но в этом случае получаемый результат округляем до ближайшего целого числа. Например, для заданных условий р = 60//п2 = 3000/980 = 3,06; отбросив сотые доли, получаем число пар полюсов двигателя—3.
Частота вращения магнитного поля
Номинальное значение скольжения
Мощность, потребляемая двигателем,
Номинальный вращающий момент двигателя
Мmax = λ*.М ном = 1,8 • 389,8 = 701,6 Н • м.
Для определения фазных, линейных и пусковых токов (фазными являются токи в обмотках статора, линейными—токи в подводящих проводах) нужно учесть следующее: если двигатель рассчитан на работу от сети переменного тока с напряжением, 220/380 В, то это значит, что каждая фаза обмотки статора рассчитана на напряжение 220 В. Обмотку необходимо включить по схеме «треугольник», если в сети линейное напряжение U=220 В, и по схеме «звезда», если в сети линейное напряжение U=380 В.
Определяем фазный, линейный и пусковой токи при линейном напряжении U=220 В и соединении обмотки статора по схеме «треугольник».
Фазный ток в обмотке статора

Найдем значения фазных, линейных и пусковых токов, если обмотки статора включены по схеме «звезда» и подключены к сети с линейным напряжением U=38О В.
Значение фазного тока найдем из формулы мощностей для линейных значений токов и напряжений

При соединении обмоток в «звезду» линейный ток

Из сопоставления фазных, линейных и пусковых токов при различных соединениях обмоток можно заметить, что фазные токи оказались практически одинаковыми, а линейные и пусковые — различными.
Для определения возможности пуска в ход двигателя, находящегося под номинальной нагрузкой и пониженным напряжением, необходимо определить пусковой вращающий момент при пониженном напряжении.
В соответствии с формулой M=CU 2 вращающий момент двигателя пропорционален квадрату подводимого напряжения. При понижении напряжения на 10% вращающий момент
M’=C Uном = C<0,9UHOM) 2 = 0,81 х Маоы=0,81x 389,8 = 315,74 Н • м. Соответственно пусковой момент
М’п =КМ* М’= 1,1*315,74 = 347,3 Н-м, что меньше тормозного момента на валу на 42,5 Н • м, т.е. пуск невозможен.
Для понижения пусковых токов часто пуск асинхронных двигателей осуществляют при пониженном напряжении. Двигатели, работающие при соединении обмоток статора по схеме «треугольник», пускают без нагрузки путем переключения обмоток со «звезды» на «треугольник». Определить пусковой момент двигателя при данном виде пуска.
В момент пуска обмотки находятся под напряжением
UФ = Uл/  = 220/1,73 = 127 В, что составляет 57,7% Uном,
= 220/1,73 = 127 В, что составляет 57,7% Uном,
пусковой момент при переключении обмоток
М п = C*U 2 = C (0,57UHOM) 2 = 0.33CU ном =128,8 Н-м, т. е. в три раза меньше номинального значения.
Краткие теоретические сведения. Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель
Целью работы является изучение работы асинхронного двигателя с короткозамкнутым ротором и снятие его механической и рабочей характеристик.
Краткие теоретические сведения
Простота конструкции, надежность в работе, экономичность и невысокая стоимость являются основными причинами широкого использования асинхронных двигателей в промышленности.
Частота вращения магнитного поля статора n1 определяется по формуле
n1 =  , об/мин (1)
, об/мин (1)
где f1 — частота сети, Гц;
р — число пар полюсов.
Разность в частотах вращения ротора n2 и поля статора n1 выражают скольжением
s =  (2)
(2)
Скольжение возрастает с увеличением нагрузки на валу двигателя. У современных двигателей в зависимости от серии и назначения скольжение при номинальной нагрузке составляет 2…8%. При холостом ходе скольжение составляет всего 0,1…0,3%.
Если считать скольжение при номинальной нагрузке s н равным 5%, то можно указать частоты вращения ротора асинхронных двигателей при питании от сети с f = 50 Гц.
Асинхронные двигатели малой и средней мощности, благодаря возможности соединения обмоток статора по схеме Y/Δ или Δ/ Y, могут работать при питании от двух соответствующих напряжений 380/220 В.
На заводском щитке двигателя это обозначается как
Простейшим способом пуска в ход двигателя с короткозамкнутым ротором и номинальной мощностью до 100 кВт является непосредственное включение обмотки статора в трехфазную цепь.
Частота вращения ротора двигателя может быть выражена формулой
n1 = (1– s 1), об/мин. (3)
Электрическая мощность Р1, потребляемая асинхронным двигателем от сети, расходуется на полезную мощность Р2 на валу и потери мощности на нагрев обмоток статора и ротора ΔРэ1 и ΔРэ2, потери в магнитопроводе статора и в стали ротора от вихревых токов и на гистерезис ΔРст и на потери от трения в подшипниках ΔРтр.
Таким образом,баланс мощности в двигателе выразится так
Активная мощность двигателя, потребляемая из сети, вычисляется по формуле
где Р1ф = U1ф ∙ I1 – мощность одной фазы, измеренная ваттметром, Вт.
Механическая мощность, развиваемая на валу двигателя, Рмех складывается из полезной мощности на валу Р2 и потерь на трение Ртр
Механическая мощность может быть определена по формуле
где М – вращающий момент, Нм;
n2 – частота вращения ротора, обмин.
Магнитные потери в магнитопроводе статора, т.е. потери в стали ΔРст, практически не изменяются при увеличении нагрузки на валу Р2 и называются постоянными.
С другой стороны, потери на нагрев обмоток статора и ротора, т.е. потери в меди ΔРэ зависят от нагрузки и называются переменными.
Коэффициент полезного действия асинхронного двигателя η определяется как отношение полезной мощности на валу Р2 к потребляемой из сети Р1
η =  =
=  (8)
(8)
Полезная мощность двигателя на валу Р2 может быть определена по формуле
Р2 = М ∙ ω = М ∙  , Вт (9)
, Вт (9)
η =  =
=  =
=  , (11)
, (11)
где U1ф, В; I1ф, А; Cos φф – напряжение, ток и коэффициент мощности фазы двигателя.
Р1 – потребляемая активная мощность двигателя.
Коэффициент мощности Cos φф зависит от нагрузки на валу двигателя и определяется отношением активной мощности к полной мощности фазы статора двигателя
Cos φф =  =
=  (12)
(12)
В лабораторной работе коэффициент мощности Cos φ измеряется непосредственно фазометром, а также может быть вычислен по показаниям ваттметра, вольтметра и амперметра, включенных в фазу двигателя (рис.1).
Основной характеристикой асинхронного двигателя, называемой механической, является зависимость n2 = f (M), т.е. зависимость частоты вращения ротора двигателя от вращающего момента (рис.1).
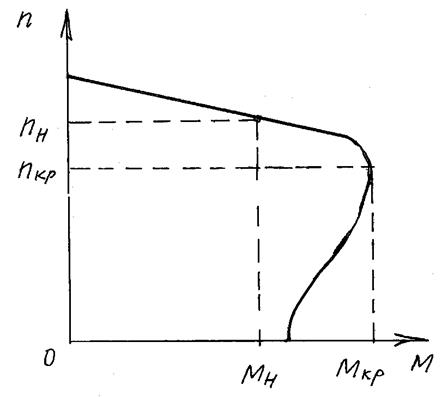
Рис.1. Механическая характеристика асинхронного двигателя.
Вращающий момент асинхронного двигателя определяют по формуле
М =  , Нм (13)
, Нм (13)
где U1ф – фазное напряжение обмотки статора, В;
n1 – синхронная частота вращения магнитного поля статора, об/мин;
р – число пар полюсов;
R1, R2 ’ , Хк – параметры схемы замещения асинхронного двигателя, Ом (рис.2).
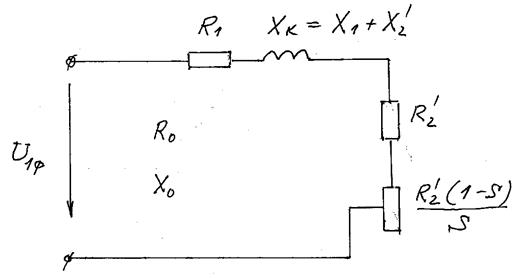
Рис.2. Схема замещения асинхронного двигателя.
Вращающий момент асинхронного двигателя в лабораторной работе измеряется по щкале электромагнитного тормоза, соединенного с валом двигателя, в г∙см (1 Нм = 9800 г∙см).
Вращающий момент асинхронного двигателя зависит от величины подводимого к фазе статора напряжения в квадрате  , скольжения s, частоты тока в статоре f1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
, скольжения s, частоты тока в статоре f1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
Меняя значение скольжения s при остальных постоянных в формуле вращающего момента можно получить различные значения моментов Мн, Мкр, Мп , показанных на естественной механической характеристике (рис.1) .
Номинальный вращающий момент Мн может быть определен по формулам
Мн = 9,55  , Нм (14)
, Нм (14)
Мн = 9,55  , Нм (15)
, Нм (15)
Наиболее полно и наглядно свойства асинхронного двигателя выявляются с помощью рабочих характеристик.
К рабочим характеристикам относятся зависимость частоты вращения ротора n2, вращающего момента М, скольжения s тока фазы статора I1ф, коэффициента мощности Сos φ и к.п.д. двигателя от полезной мощности на валу Р2 при U1 = Const и f1 = Const.
При повышении Р2 величина скольжения s увеличивается, т.к. при увеличении нагрузки на валу частота вращения ротора уменьшается (рис.3).
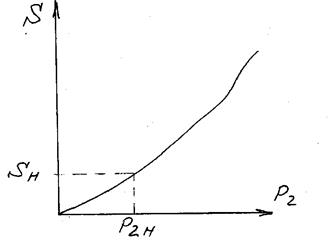
Рис.3. Зависисмость величины скольжения от полезной мощности на валу.
При холостом ходе, когда Р2 = 0 , частота вращения ротора n2 может быть принята равной частоте вращения магнитного поля статора n1 и s = 0.
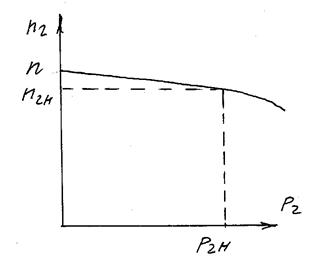
Рис.4. Механическая характеристика асинхронного двигателя.
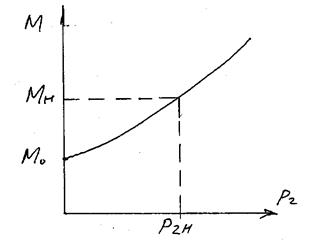
Вращающий момент М на валу ротора можно считать состоящим из полезного момента, расходуемого на совершение полезной работы, и момента холостого хода М0, расходуемого на преодоление трения. Эта доля вращающего момента практически не зависит от нагрузки на валу Р2.
Таким образом, можно считать, что М ≈  . Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n2 уменьшается при увеличении Р2, в связи с этим характеристика М = f (Р2) нелинейна и вращающий момент М быстро нарастает с увеличением Р2 (рис.5).
. Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n2 уменьшается при увеличении Р2, в связи с этим характеристика М = f (Р2) нелинейна и вращающий момент М быстро нарастает с увеличением Р2 (рис.5).
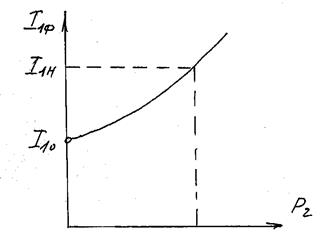
Если не учитывать ток холостого хода двигателя, составляющий 7…8% от I1ф , то ток в фазе статора пропорционален полезной мощности Р2 и увеличивается при ее повышении. При холостом ходе Р2 = 0 и I1ф = I10 (рис. 5).
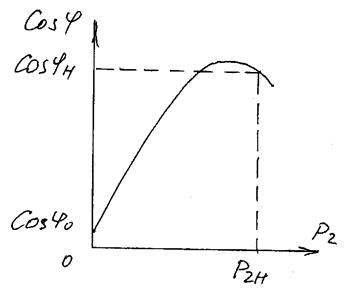
При холостом ходе двигателя коэффициент мощности Cos φ двигателя мал и обычно не превышает 0,2, но затем при увеличении нагрузки на валу Р2 он быстро растет и достигает максимума при мощности, близкой к номинальной (рис. 6). Это происходит потому, что при возрастании нагрузки активная мощность Р1, потребляемая из сети, увеличивается, а реактивная мощность Q1 почти не изменяется. Вследствие этого главный магнитный поток практически остается постоянным. При нагрузках больше номинальных Cos φ снижается в связи со значительным ростом реактивных мощностей, связанных с влиянием потоков рассеяния.
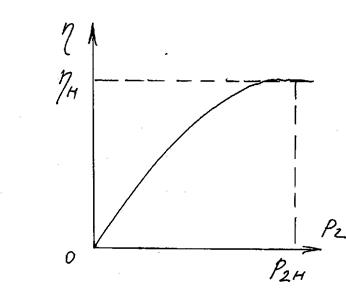
Анализируя зависимость η = f (Р2) , можно видеть, что при изменении нагрузки на валу Р2 постоянные потери ΔРтр и ΔРст практически не изменяются, а начальный момент увеличение потерь в активном сопротивлении обмоток ΔРэ значительно меньше роста полезной мощности на валу. При Р2 = Р2н постоянные потери ΔРтр и ΔРст становятся равными переменным ΔРэ , а доля потерь в энергетическом балансе уже становится соизмеримой с Р2 . Вследствие этого к.п.д. начинает несколько уменьшаться (рис. 7).
План работы.
1. Ознакомиться с конструкцией асинхронного двигателя, типами измерительных приборов, устройством электромагнитного тормоза. В форму, предусмотренную отчетом по лабораторной работе, записать технические данные используемых приборов и электрооборудования.
2. Собрать электрическую схему (рис. 8) и предъявить ее для проверки преподавателю или лаборанту.
3. После проверки схемы поставить регулятор автотрансформатора (АТ) в положение «0» и включить выпрямитель.
4. Включить фототахометр и нажать кнопку «Пуск» на электрическом стенде.
5. При помощи автотрансформатора (АТ) изменить момент сопротивления электромагнитного тормоза в пределах 0…0,01 Нм (0,100.200,300,400,500,600,700,800,900,1000 г∙см).
6. Измерить по приборам следующие величины: напряжение на фазе двигателя U1ф по вольтметру V, ток в фазе I1ф по амперметру А1, потребляемую фазой двигателя активную мощность P1ф по ваттметру W, частоту вращения ротора n по фототахометру.
Измерения произвести для 11 различных моментов сопротивления на валу двигателя.
Рабочие характеристики трехфазного асинхронного двигателя
Рабочими характеристиками называются зависимости мощности Р1скольжения s, тока в фазе статора I1, КПД η и cosφ1 от полезной мощности Р2при U1= const и f1 = const.
Характеристики строятся для зоны практически устойчивой работы двигателя, т.е. до значений скольжений(1,1. 1,2)%. Опытным путем характеристики получают путем изменения нагрузки на валу двигателя при помощи вспомогательного нагрузочного устройства, из которых предпочтительным является генератор постоянного тока независимого возбуждения. Непосредственно измеряют момент, скорость вращения, ток статора, мощность, потребляемую из сети. Скольжение, КПД и коэффициент мощности определяют расчетным путем по соотношениям, приведенным выше.
Рабочие характеристики, построенные в относительных единицах, представлены на рис. 3.16.
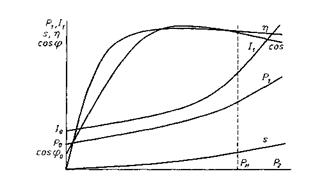
Зависимость s(P2) практически линейна и кривая слабо наклонена к оси абсцисс, поскольку sH ≈ (0,08. 0,1) и момент практически линейно зависит от скольжения.
Зависимость Р1 (Р2) также близка к линейной, как и зависимость I1(Р2). Это свидетельствует о том, что активная составляющая тока пропорциональна полезной мощности Р2. Реактивная составляющая тока в диапазоне рабочих нагрузок меняется мало, поскольку она определяется током холостого хода I0, который составляет 20. 40% от номинального тока. Поэтому зависимость I1(P2) выходит не из начала координат.
Зависимость cosφ1 = f(P2) показывает, что при малых нагрузках cosφ1 имеет низкие значения (0,1. 0,3). С увеличением нагрузки cosφ1 увеличивается, достигая максимума (0,75. 0,9) при нагрузке, близкой к номинальной. С ростом нагрузки и мощности активная составляющая мало изменяется по сравнению с режимом холостого хода. При дальнейшем росте нагрузки cosφ1 снижается из-за роста потоков рассеяния обмоток.
Зависимость η(Р2) имеет такой же характер, как и у трансформатора. Максимум КПД имеет место при нагрузках, немного меньших, чем номинальное значение. При дальнейшем увеличении нагрузки КПД снижается из-за роста электрических потерь, которые пропорциональны квадратам токов статора и ротора.
Из анализа рабочих характеристик следует, что при малых нагрузках работа двигателя неэффективна, он имеет малые значения КПД и коэффициента мощности. С другой стороны, если двигатель перегружен, то эффективность его работы также снижается, но сверх того, он испытывает повышенный нагрев, а условия охлаждения, напротив, ухудшаются, поскольку интенсивность охлаждения зависит от куба скорости вращения вентилятора на валу двигателя. Поэтому, выбирая двигатель для конкретного механизма, следует как можно точнее рассчитывать его мощность.
Способы пуска и регулирования
Частоты вращения АД.
Пусковые свойства асинхронных двигателей в основном определяются следующими величинами: пусковым током, пусковым моментом, плавностью и экономичностью процесса пуска, длительностью пуска. В каталогах обычно указывается кратность пускового тока IП/IН и пускового момента МП/МН.Кроме того, пусковые свойства асинхронного двигателя определяются особенностями его конструкции, в частности устройством ротора, который может быть с обычной короткозамкнутой обмоткой, с глубокопазной короткозамкнутой обмоткой, с фазным ротором.
Различают три вида пуска: прямой, пуск с пониженным напряжением на статоре, реостатный пуск (для двигателей с фазным ротором).
Прямой пуск наиболее простой и чаще всего применяется для пуска двигателей с короткозамкнутым ротором. Необходим лишь коммутирующий аппарат — рубильник или магнитный пускатель, а для двигателя высокого напряжения — масляный выключатель. Пуск происходит путем непосредственного подключения обмотки статора к сети. При прямом пуске двигателя кратность пускового тока велика и составляет примерно 5,5. 7 (для двигателей мощностью 0,6. 100 кВт при синхронной скорости 750. 3000 об/мин). Кратковременный толчок пускового тока относительно безопасен для двигателя, но вызывает увеличение потери напряжения в сети и может неблагоприятно сказаться на других потребителях энергии, присоединенных к той же сети. Поэтому допустимая номинальная мощность асинхронных двигателей при прямом пуске зависит от мощности распределительной сети. В мощных сетях допускается прямой пуск двигателей с короткозамкнутым ротором мощностью и до 1000 кВт, но в большинстве случаев эта мощность не превышает 100 кВт.
У двигателей общепромышленного исполнения с короткозамкнутой обмоткой ротора кратность пускового момента лежит в пределах 1,2. 2,5. Таким образом, двигатель при пуске имеет большую силу тока, а развивает относительно небольшой пусковой момент.
Пуск с пониженным напряжением на статоре. Используется для мощных двигателей с целью ограничения пускового тока. Используют для этой цели реакторы (трехфазные катушки индуктивности), автотрансформаторы (рис. 3.17).

Рис. 3.17. Схема пуска короткозамкнутого двигателя: а — с помощью реактора; б — при помощи автотрансформатора
Для уменьшения пускового тока можно на начальном этапе пуска понизить напряжение на зажимах статора, включив последовательно с обмоткой статора трехфазное индуктивное сопротивление — реактор Р (рис. 3.17,а). При пуске замыкается выключатель В1, и, таким образом, осуществляется последовательное соединение реактора и двигателя МА. Когда скорость двигателя приближается к номинальной, замыкается выключатель В2, который закорачивает катушку и подает напряжение сети непосредственно на статор МА. Уменьшение пускового тока, создаваемое понижением напряжения на статоре, вызывает уменьшение пускового момента, пропорционального квадрату напряжения на статоре. Например, при таком пуске уменьшение пускового тока в 2 раза будет сопровождаться уменьшением пускового момента в 4 раза. Во многих случаях при пуске двигателя под нагрузкой такое понижение момента недопустимо, двигатель не сможет преодолеть механический момент торможения на валу.
Еще менее выгодно применение вместо реактора активного сопротивления поскольку это связано с дополнительными потерями энергии в реостате.
Для мощных двигателей часто применяется пуск при помощи автотрансформатора (рис. 3,17,б). Пуск происходит в два этапа: на первом этапе переключатели П1-ПЗ находятся в положении 1. На двигатель МА подается пониженное фазное напряжение, и пусковой ток уменьшается пропорционально коэффициенту трансформации, но пусковой ток в сети меньше пускового тока двигателя в k раз. Следовательно, понижение напряжения автотрансформатором в к раз уменьшает пусковой ток в сети в k 2 раз. В то же время пусковой момент, пропорциональный квадрату напряжения, уменьшается в k 2 раз. Таким образом, пусковой момент уменьшается пропорционально линейному пусковому току, тогда как при реостатном пуске момент уменьшается пропорционально квадрату пускового тока. Например, при понижении напряжения автотрансформатором вполовину пусковой ток сети понизится в 2 раза и в 2 раза понизится и пусковой момент. На втором этапе переключатели П1-ПЗ переводятся в положение 2 и к статору подводится полное напряжение сети.
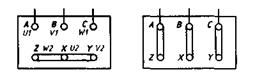
Рис. 3.18. Расположение на щитке зажимов начал и концов обмотки
Следует отметить, что для машин переменного тока, разработанных после 1 января 1987 г., установлена система обозначений выводов обмоток (ГОСТ 26772-85), соответствующая международным стандартам: фаза A: U1w U2, фаза В: V1 и V2, фаза С: W1 и W2. При соединении обмотки в «звезду» внутри двигателя используют обозначения выводов: U, V, W (N — если нейтраль выведена); при соединении обмотки в «треугольник»: U, V, W. Линейные провода на схеме обозначаются соответственно: L1, L2w L3.
Хорошими пусковыми свойствами обладает асинхронный двигатель с двойной беличьей клеткой. В таком двигателе короткозамкнутая обмотка ротора выполнена в виде двойной беличьей клетки, т. е. короткозамкнутый ротор снабжается двумя клетками, лежащими в теле ротора одна над другой: нижней — рабочей / и верхней — пусковой 2 (рис. 3.19,а). Стержни нижней клетки имеют обычно большее сечение (рис. 3.19,б). Таким образом, активное сопротивление верхней клетки значительно больше активного сопротивления нижней клетки (в 4—5 раз). Обе клетки
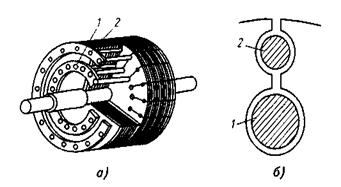
Рис. 3.19. Ротор с двойной беличьей клеткой (а) и сечения верхнего и нижнего стержней (б)
В первый момент пуска двигателя (пока g = 1) частота токов в роторе равна частоте сети; в этих условиях полное сопротивление внутренней клетки обусловливается главным образом ее большим индуктивным сопротивлением. Таким образом, при пуске двигателя в роторе имеет место явление вытеснения тока из внутренней беличьей клетки. В то же время полное сопротивление наружной клетки является преимущественно активным сопротивлением и создает большой пусковой момент, как это имеет место и у двигателя с контактными кольцам при включении пускового активного сопротивления. Отношение токов верхней и нижней клеток зависит от отношения полных сопротивлений этих клеток; обычно при пуске ток нижней клетки значительно меньше тока верхней клетки.
По мере разгона ротора частота токов в нем уменьшается, уменьшается и влияние индуктивного сопротивления на распределение токов. При номинальной скорости вращении частота токов ротора имеет значение порядка 1 Гц; в этих условиях индуктивные сопротивления весьма малы и распределение токов между клетками ротора определяется отношением активных сопротивлений клеток, поэтому большая часть тока проходит по нижней, рабочей клетке, а результирующее активное и полное сопротивления ротора в таких условиях малы, как у обычного двигателя с короткозамкнутым ротором.
Таким образом, у двигателей с двойной беличьей клеткой активное сопротивление обмотки ротора в целом изменяется в зависимости от изменения скольжения — оно велико при пуске и мало при номинальной скорости. Благодаря этому двигатель с двойной беличьей клеткой, по сравнению с обычным двигателем, имеющим короткозамкнутый ротор, развивает повышенный пусковой вращающий момент при пониженном пусковом токе.
Двигатель с глубоким пазом ротора также обладает повышенным пусковым моментом. Это обусловлено также явлением вытеснения тока и представляет собой упрощенный вариант двигателя с двойной клеткой. Обмотка ротора этого двигателя изготовляется из прямоугольных стержней малой ширины и большой высоты, которые помещаются в соответствующие глубокие пазы в стали ротора или заливаются в них.

Рис. 3.20. Стержень ротора и распределение магнитного
поля в глубокопазном ротаре
Переменный ток распределяется по сечению проводника в общем случае неравномерно; это явление использовано в данном двигателе. На рис. 3.20 показано поле рассеяния, замыкающееся поперек глубокого паза, когда по стержню обмотки проходит ток.
Часть стержня, лежащая в глубине паза, сцеплена с большим потоком рассеяния, чем верхняя часть того же стержня. Вследствие этого при пуске двигателя в повышенное реактивное сопротивление нижней части стержня вызывает вытеснение тока ротора в верхнюю часть сечения стержня. Это эквивалентно уменьшению сечения стержня и увеличению активного сопротивления обмотки ротора, благодаря чему повышается пусковой момент двигателя и уменьшается пусковой ток.
При рабочей скорости двигателя индуктивное сопротивление становится незначительным благодаря уменьшению частоты, ток распределяется по сечению стержня почти разномерно и двигатель работает, как обычный короткозамкнутый.
Двигатель с глубоким пазом ротора в конструктивном отношении проще двигателя с двойной клеткой и получил широкое применение.
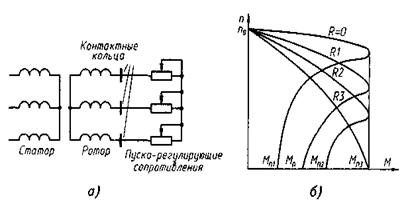
Рис. 3.21. Схема соединения обмоток статора и ротора
асинхронного двигателя с фазным ротором (а)
и механические характеристики двигателя при увеличении
пускорегулирующего сопротивления от 0 до R3 (б)
При изменении добавочного сопротивления в цепи ротора максимальный момент двигателя не изменяется, поскольку он не зависит от активного сопротивления ротора, увеличение сопротивления только смещает его в сторону большего скольжения. Выключение ступеней пускового реостата заставляет двигатель переходить с одной характеристики на другую.
Сопротивления реостата обычно выводят на контакты, благодаря чему при пуске момент двигателя и ток изменяются по ступенчатой кривой (рис. 3.21,б), число ступеней которой определяется числом контактов пускового реостата. Чем ближе пусковой момент к максимальному моменту, тем больше будет и пусковой ток. По этой причине лишь для особо тяжелых условий пуска реостат подбирается так, чтобы пусковой момент был равен максимальному.
Пусковой реостат должен в течение времени пуска, не перегреваясь, поглощать мощность, примерно равную мощности двигателя. Следовательно, размеры пускового реостата определяются частотой пусков. В ряде случаев пусковые реостаты выполняются с масляным охлаждением.
Таким образом, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая толчок тока. Однако, с другой стороны, двигатель с фазной обмоткой ротора дороже двигателя с короткозамкнутой обмоткой, усложняется его обслуживание, что следует иметь в виду при подборе двигателя для конкретных механизмов.
Технические характеристики трехфазных электродвигателей
Технические характеристики электродвигателей
Технические характеристики, они же паспортные данные электродвигателя — это характеристики которые указываются заводом-изготовителем на шильдочке прикрепляемой к корпусу электродвигателя.
В случае если шильдик с паспортными данными не сохранился характеристики электродвигателя можно определить расчетным путем.

Шильдик с характеристиками (паспортными данными) электродвигателя:

И так, какую же информацию мы видим на шильдике электродвигателя? Разберем каждый параметр в отдельности:

Сначала указывается тип, марка и заводской номер электродвигателя, на этом мы останавливаться не будем. Далее по пунктам:
-
3Ф — трехфазный электродвигатель.
— переменный ток сети.
- 50 Hz — частота тока сети 50 Гц (Герц).
- У каждого электродвигателя имеется возможность соединения его обмоток по схеме треугольник — обозначается: Δ, либо по схеме звезда — обозначается Y в зависимости от схемы соединения обмоток меняются и такие его характеристики как напряжение сети и ток сети. Например, в нашем случае: Δ/ Y 220/380 V 2,8/1,8 А — это значит, что при схеме соединения «треугольник» Δ — электродвигатель подключается на напряжение 220 Вольт и потребляет из сети 2,8 Ампера, а при схеме соединения «звезда» Y- подключается на напряжение 380 Вольт и потребляет из сети 1,8 Ампера. Подробнее о схемах соединения обмоток электродвигателя вы можете прочитать в этой статье.
- Мощность на валу электродвигателя в килоВаттах, в нашем случае — 0,55 кВт.
- Частота вращения вала электродвигателя, в нашем случае 1360 оборотов в минуту.
- Коэффициент полезного действия (КПД) — это процентное соотношение мощности отдаваемой электродвигателем, т.е. мощности на валу и мощности потребляемой электродвигателем из сети. Например: если мощность электродвигателя 8 кВт, а его КПД — 80%, то из сети он потребляет 10кВт, остальные 2 кВт тратятся на нагрев обмоток электродвигателя, потери на трение в подшипниках и т.д.
- Коэффициент мощности — это отношение активной мощности к полной, он показывает, насколько сдвигается по фазе переменный ток, протекающий через нагрузку, относительно приложенного к ней напряжения.
- Режим работы электродвигателя. Всего ГОСТом предусмотрено 8 режимов работы (S1-S8), S1 — самый распространенный из них, данный режим подразумевает продолжительную работу электродвигателя, без частых остановок и запусков. Описание всех режимов работы электродвигателей представлено в следующей таблице:

- Класс внутренней защиты корпуса, в нашем случае IP54 — пылезащищенный корпус с защитой от водяных брызг. Подробнее о том как расшифровывать Коды классов внутренней защиты вы можете прочитать в этой статье.
- Класс изоляции обмоток электродвигателя — показывает до каких температур может нагреваться электродвигатель в процессе работы без вреда для изоляции его обмоток.
Всего есть семь классов изоляции по нагревостойкости:

2. Таблица технических характеристик электродвигателей аир
Ниже представлены технические характеристики асинхронных электродвигателей серии АИР, кроме того вы можете самостоятельно произвести расчет характеристик электродвигателя с помощью онлайн калькулятора.
ПРИМЕЧАНИЕ: Пусковой ток электродвигателя рассчитывается путем умножения номинального тока (тока статора) на кратность пускового тока:

Приведенные в таблице данные электродвигателей могут немного отличаться в зависимости от производителя электродвигателя и года выпуска.
Была ли Вам полезна данная статья? Или может быть у Вас остались вопросы? Пишите в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
