

Чертежи китайского лазерного гравера
Самодельный гравировщик лазерный: как сделать гравер ЧПУ на Ардуино своими руками
Я видел в сети много самодельных лазерных граверов и инструкций по их сборке, и захотел собрать свою собственную версию.
После многочисленных попыток, у меня получился лазерный гравер на Ардуино своими руками, надежный и приятный в использовании.
Максимальная мощность – 3 Вт, но обычно я работаю на 2 Вт, чтобы поберечь лазерный диод. Честно говоря, разница между 2 и 3 Вт практически не заметна.
Лазерный модуль с проводами и стеклянной линзой
В этой статье я покажу, что можно собрать, обходясь минимумом материалов и практически не тратясь.
Думаю, вы уже знакомы с GRBL (программа открытого проекта для Arduino, предназначенная для фрезерных — граверных станков и лазерных станков), с редактором Inkscape и с тем, как создавать файлы Gcode.
Я не буду подробно расписывать электронику, в этой статье не будет всеобъемлющей информации, возможно, в будущем я раскрою какие-то моменты более подробно — я вполне допускаю, что дал недостаточно информации, чтобы собрать гравировщик ЧПУ легко с первого раза.
- STL-файлы, готовые для распечатки
- GRBL-программу для моей конфигурации
- плагин лазерного гравировщика, который я использую для Inkscape
- файл с подсчетом стоимости деталей. Почти все их можно заказать на Aliexpress
- файлы EAGLE для создания модуля с мосфет-диодом для индикации включения-выключения гравировщика
Для печати плат рекомендую сервис OSH Park.
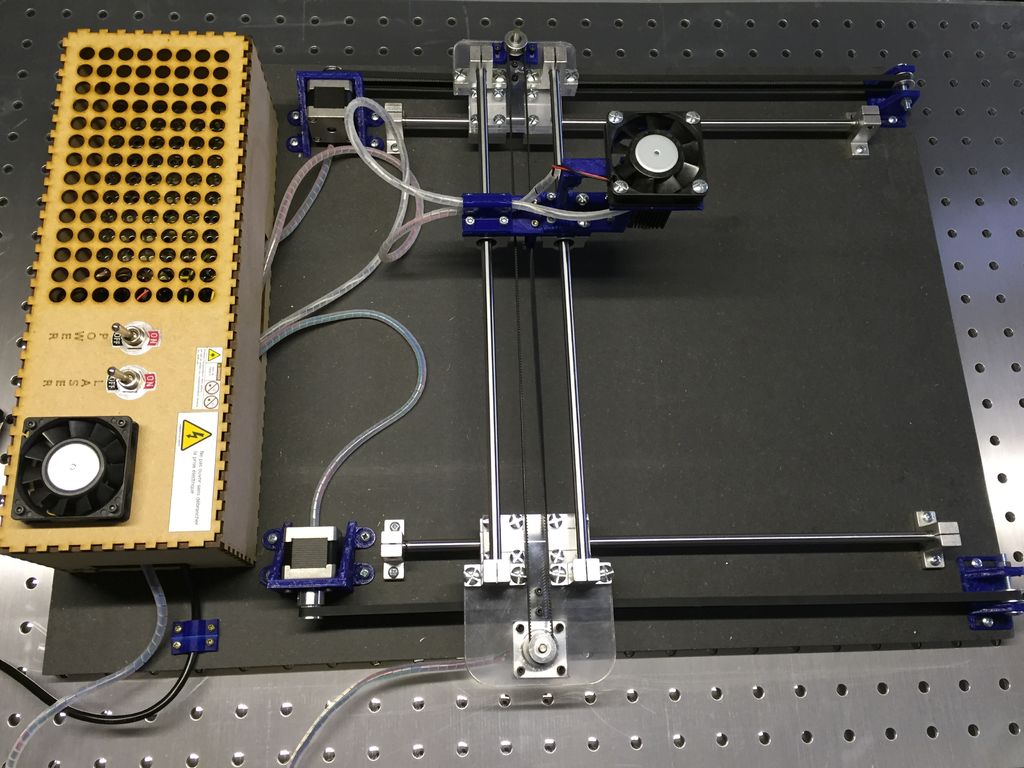
Шаг 1

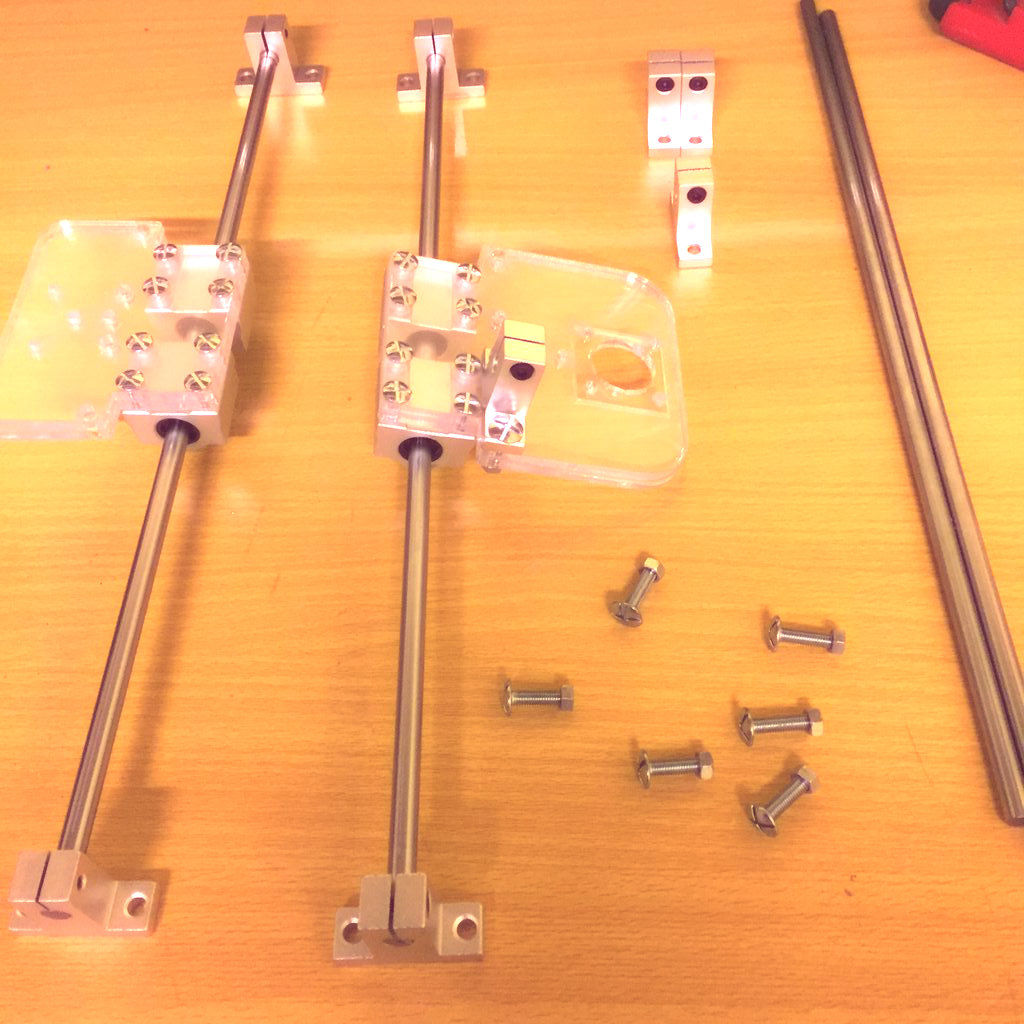
Берем два линейных вала и четыре суппорта для них.
Шаг 2

- Закрепляем валы в двух суппортах
- Берем четыре закрытых линейных подшипника в корпусе
Шаг 3
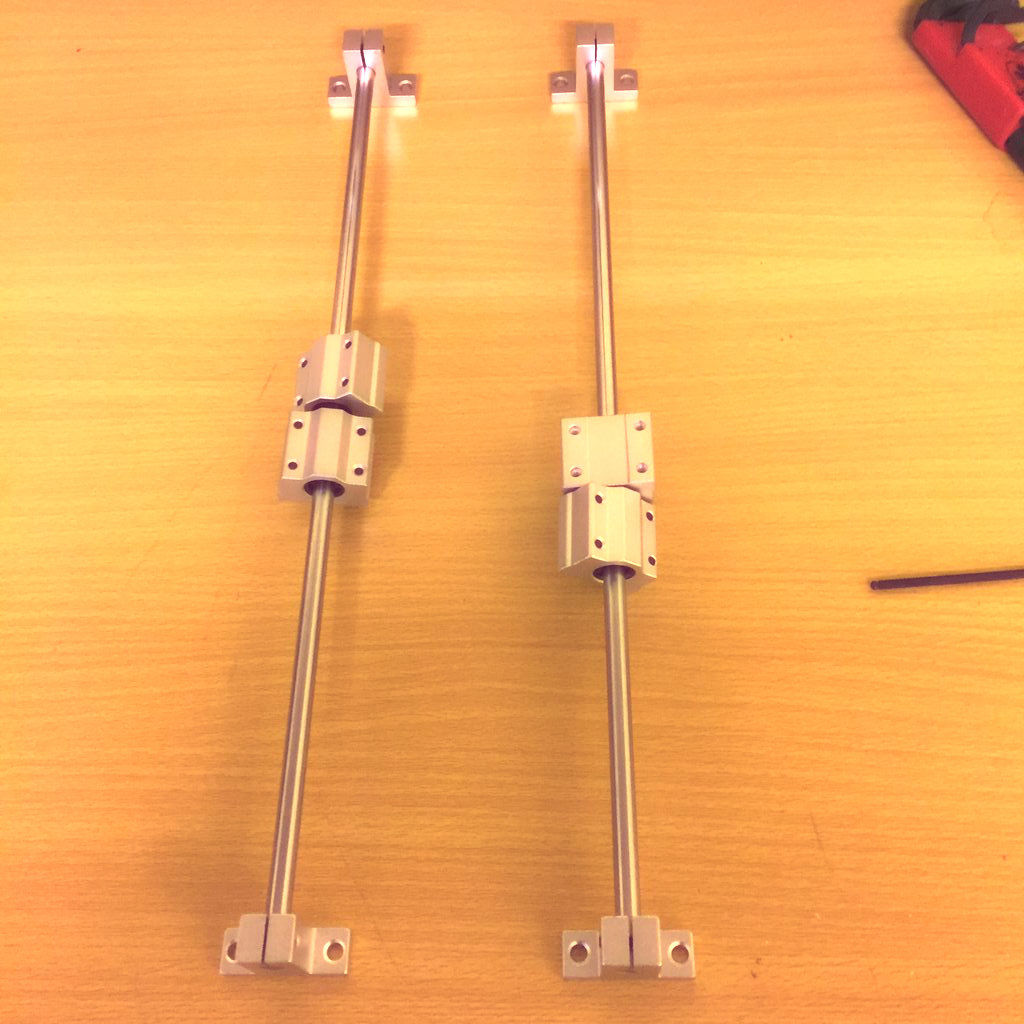
Надеваем на валы по два подшипника и закрепляем валы в оставшихся двух суппортах
Шаг 4
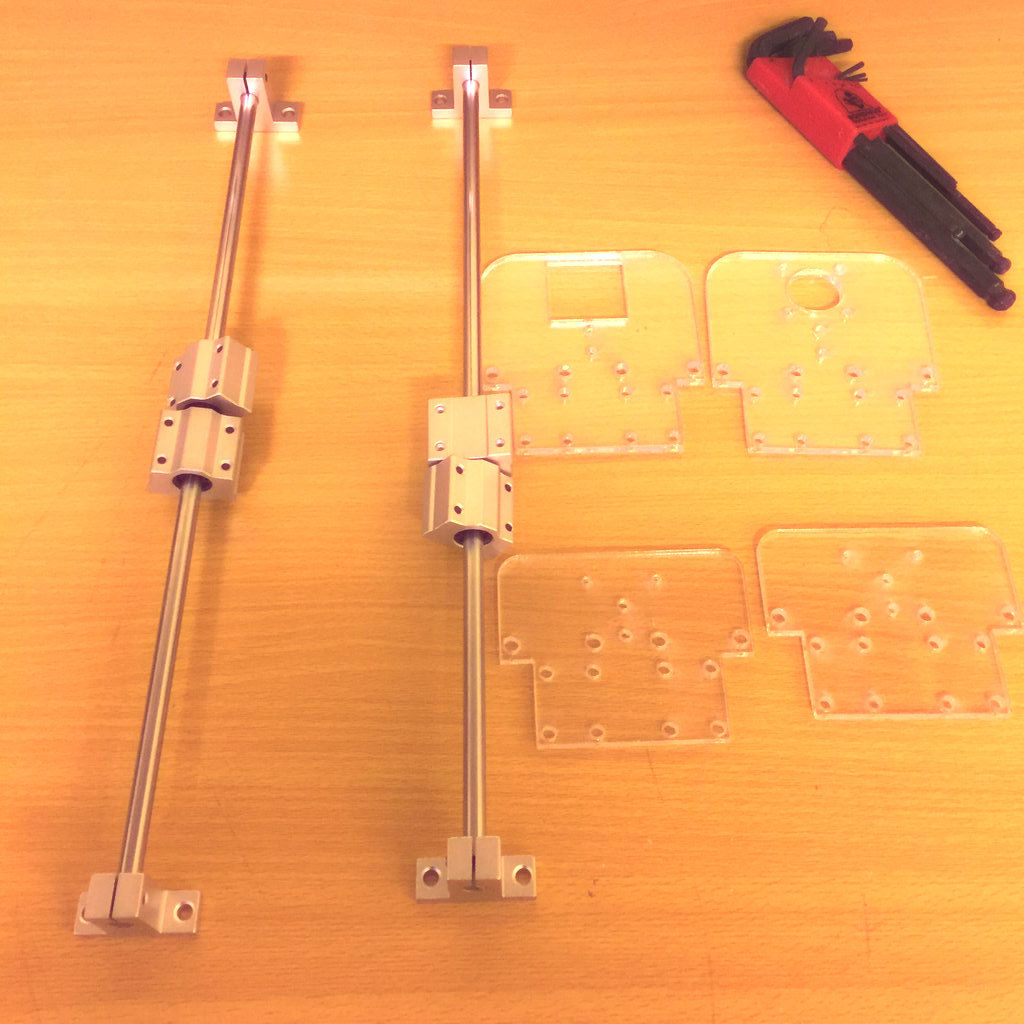
Подготавливаем пластины для лазерного резака (держатели каретки).
Шаг 5
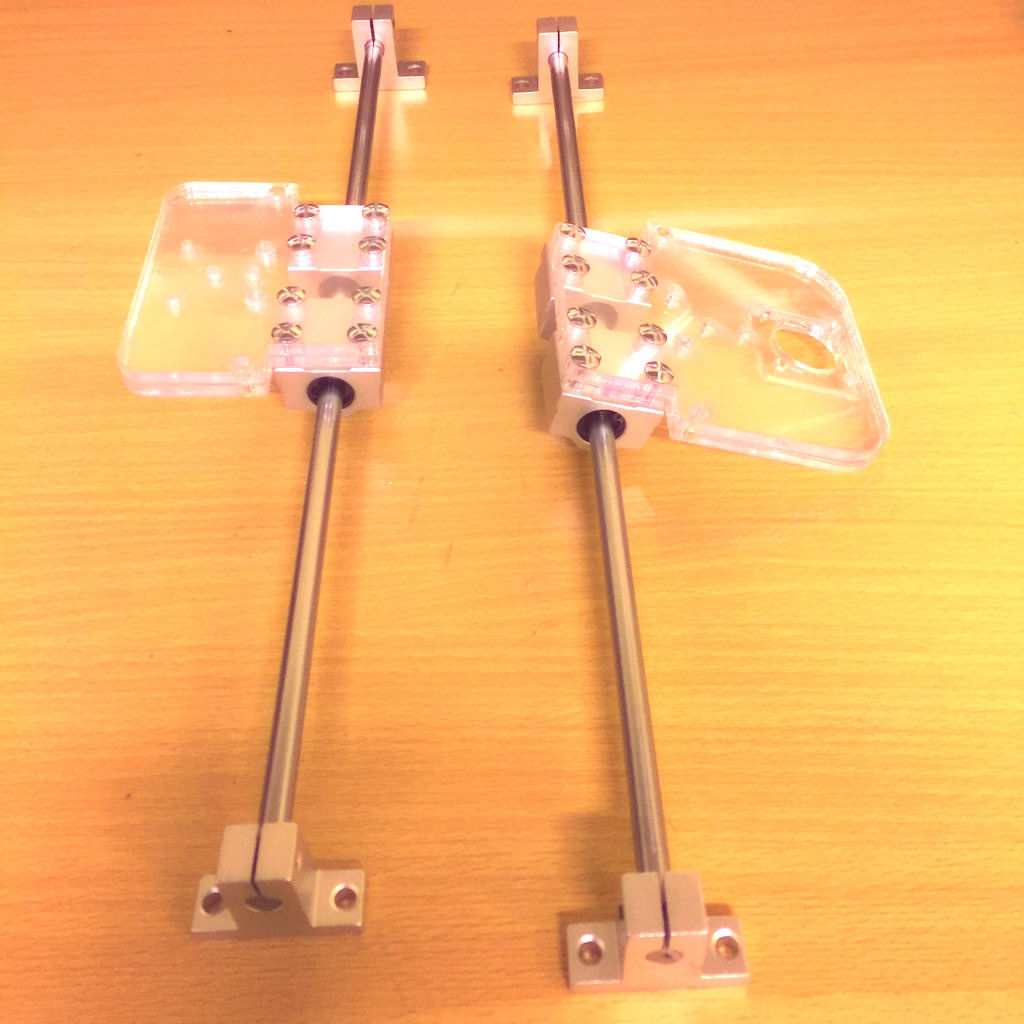
Закрепляем пластины на подшипники.
Используем винты М4 16мм.
Шаг 6

Берем еще два линейных вала, суппорты к ним, винты М5 20 мм с гайками.
Монтируем суппорты на держатели каретки.
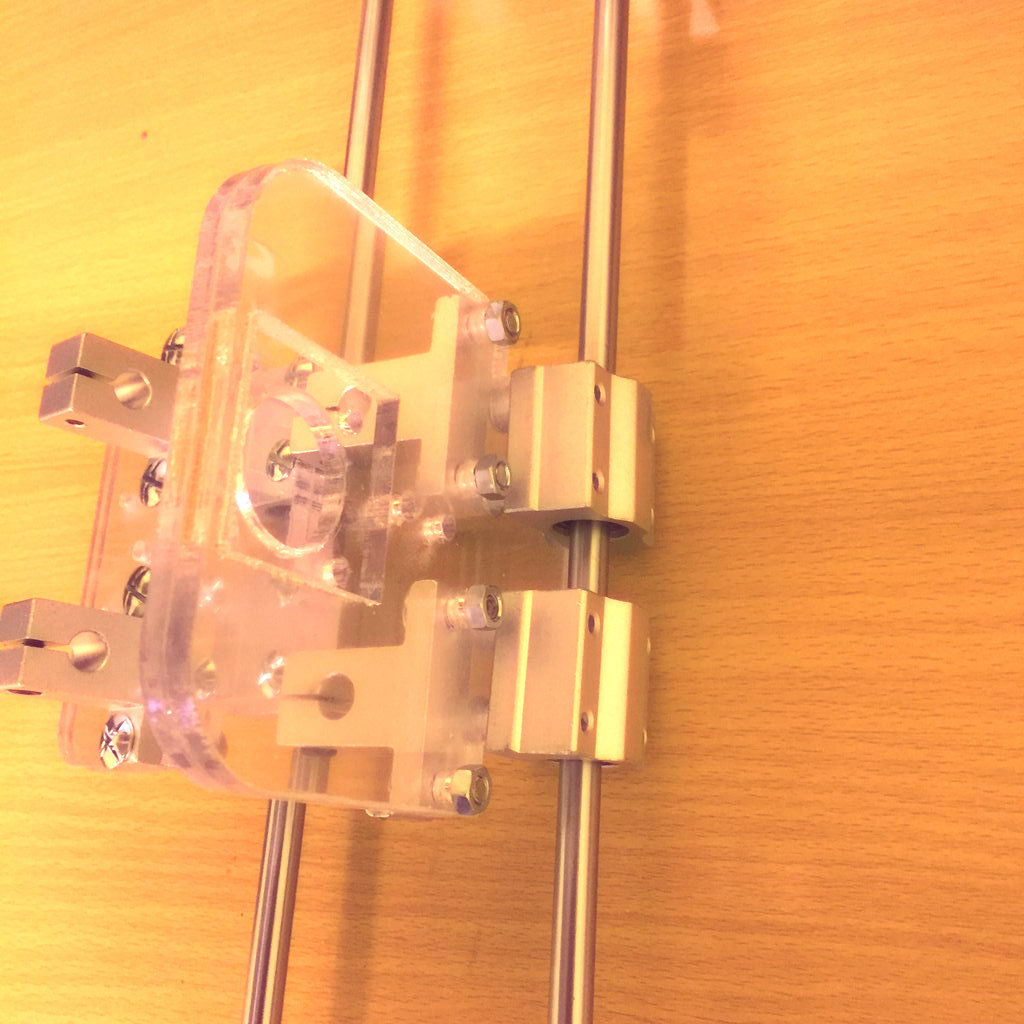
Шаг 7
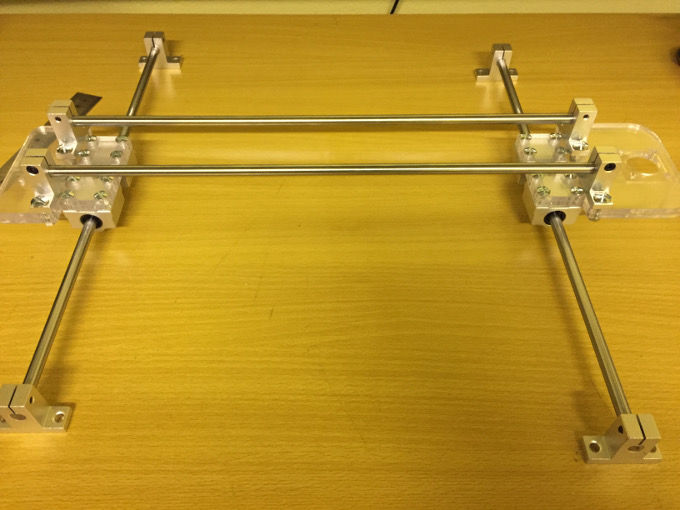
Монтируем линейные валы в суппорты на держателях, это ось Х, и проверяем ход подшипников по нижним валам, это ось Y.
Подготовьте два закрытых подшипника, 8 винтов М4 16 мм и каретку, напечатанную на 3Д принтере.
Разберите ось Х, наденьте на линейные валы подшипники и каретку, и закрепите суппорты снова.
Шаг 8
Теперь монтируем конструкцию на деревянную плиту. Движения должны быть точными и уверенными.
К этому этапу, к сожалению, не сделано фотографий.
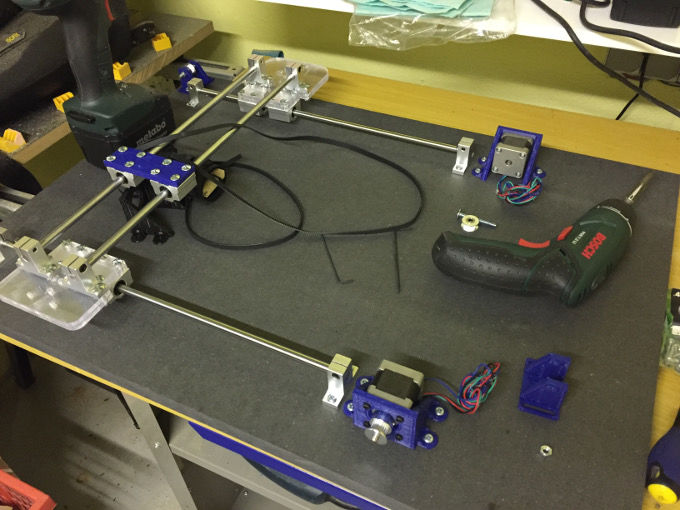
Шаг 9
Закрепляем два электродвигателя на оси Y креплениями, напечатанными на 3Д-принтере.
Для этого используйте винты М3 10мм.
Закрутите винты, убедившись, что они выставлены ровно.
Шаг 10
Ременная передача оси Y

Соберите натяжные механизмы и привинтите их на платформу (для этого возьмите винты 5 мм с гайками).
Шаг 11
Подготовьте крепления ремней и винты М3 25 мм.
Закрепляя ремни на оси Y будьте терпеливы, это достаточно сложная работа.
Шаг 12
Устанавливаем двигатель на ось Х
Вообще, это можно было сделать и раньше.
В нашем случае делаем следующее:
- немного раскрутите винты, чтобы приподнять каретку
- под кареткой установите двигатель
- привинтите его винтами М3
Шаг 13
Ременная передача на оси Х
В отверстие детали, напечатанной на 3Д-принтере, вставьте винт М4, пластик достаточно мягкий для этого.
Наденьте шкив на винт М4 и закрепите натяжной механизм на приборе.
К этому этапу снова не сделано фотографий.
Шаг 14
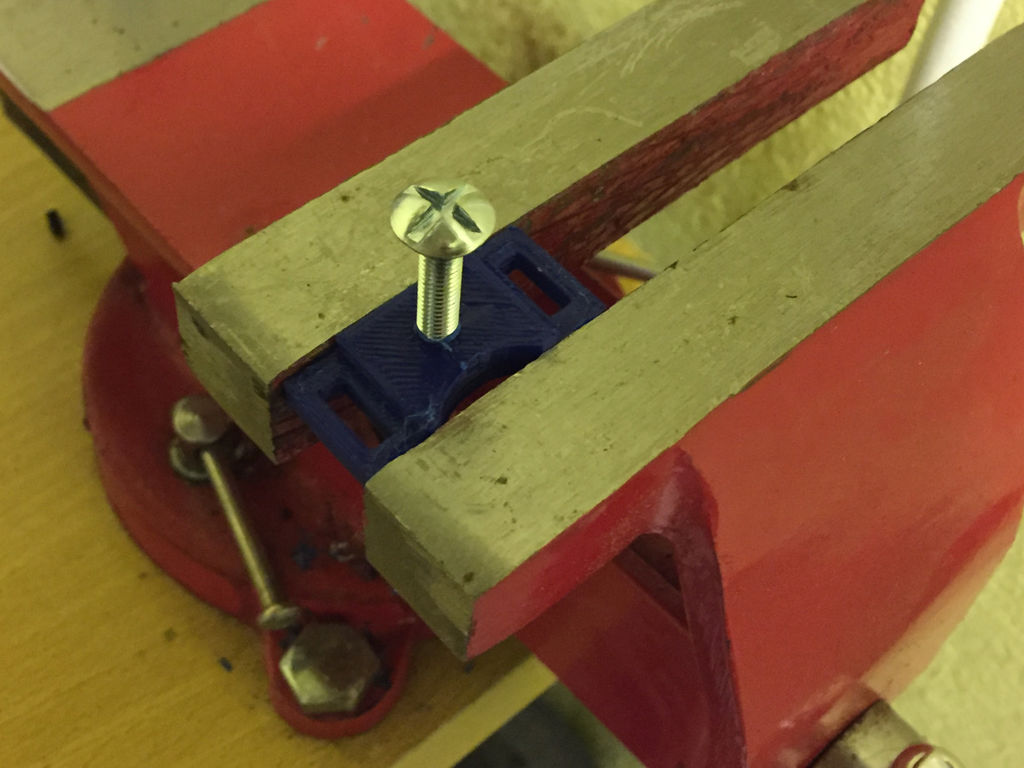
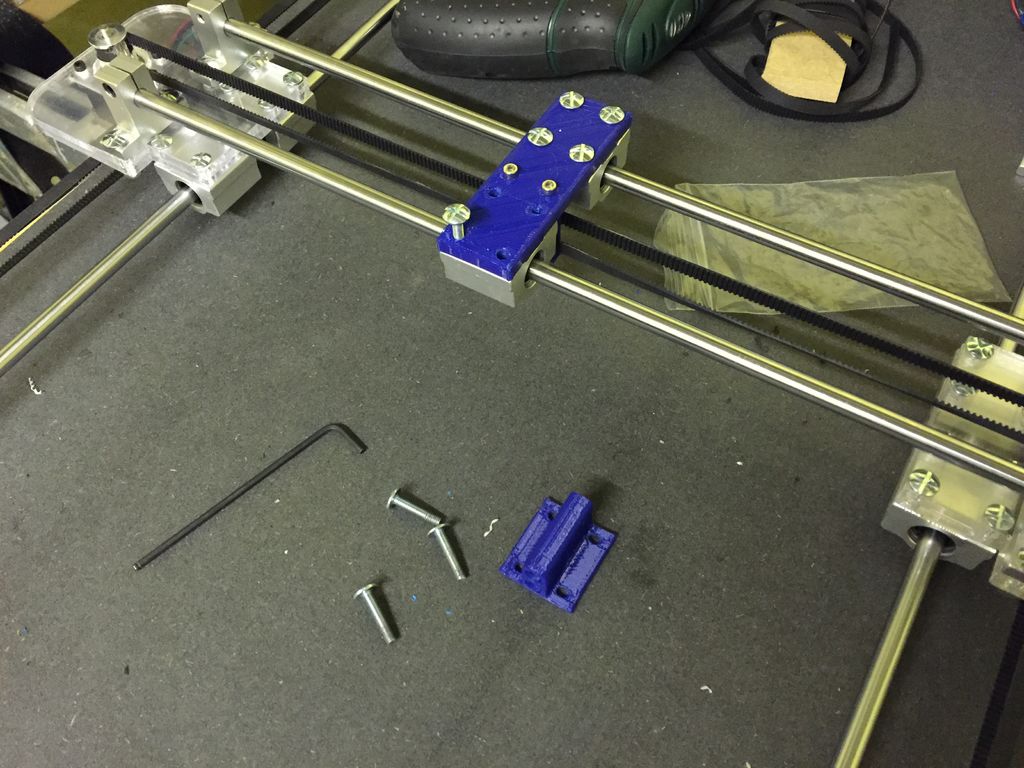
Держатели ремня на оси Х



- Подготовьте составные части для держателя ремня.
- Вставьте винты М3 в отверстия деталей, как показано на картинке.
- В оставшиеся 2 отверстия также вставьте винты (фото следующего шага).
- Установите держатели ремней на место.
Шаг 15


Шаг 16

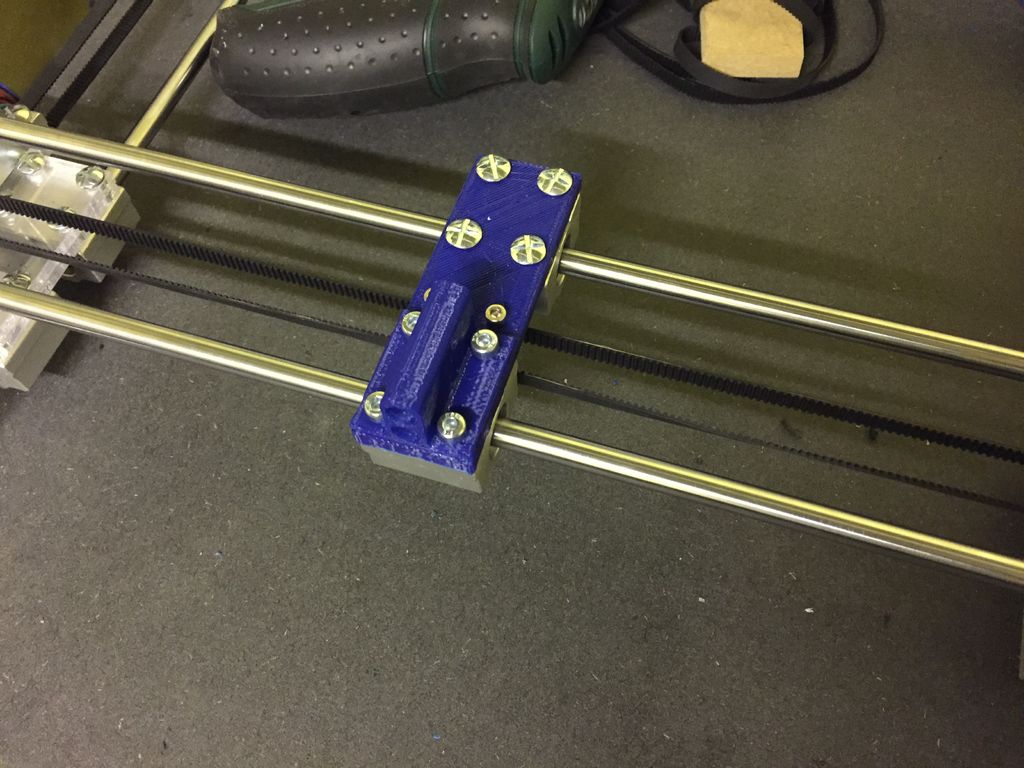
Установите держатель шнура.
Шаг 17
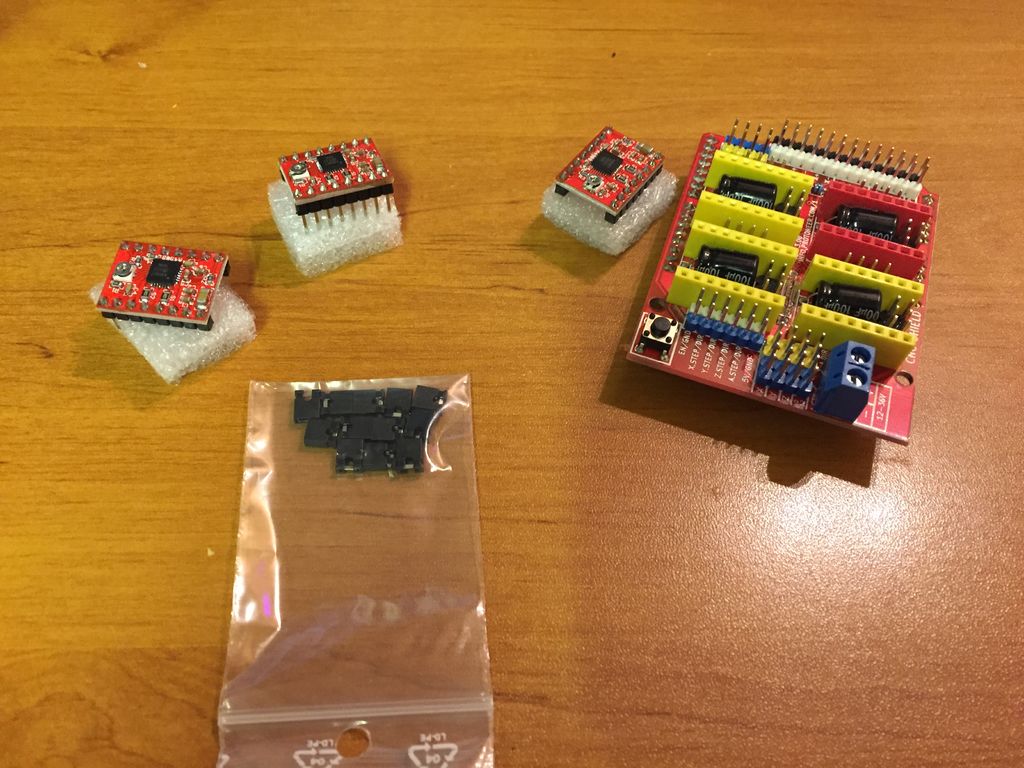
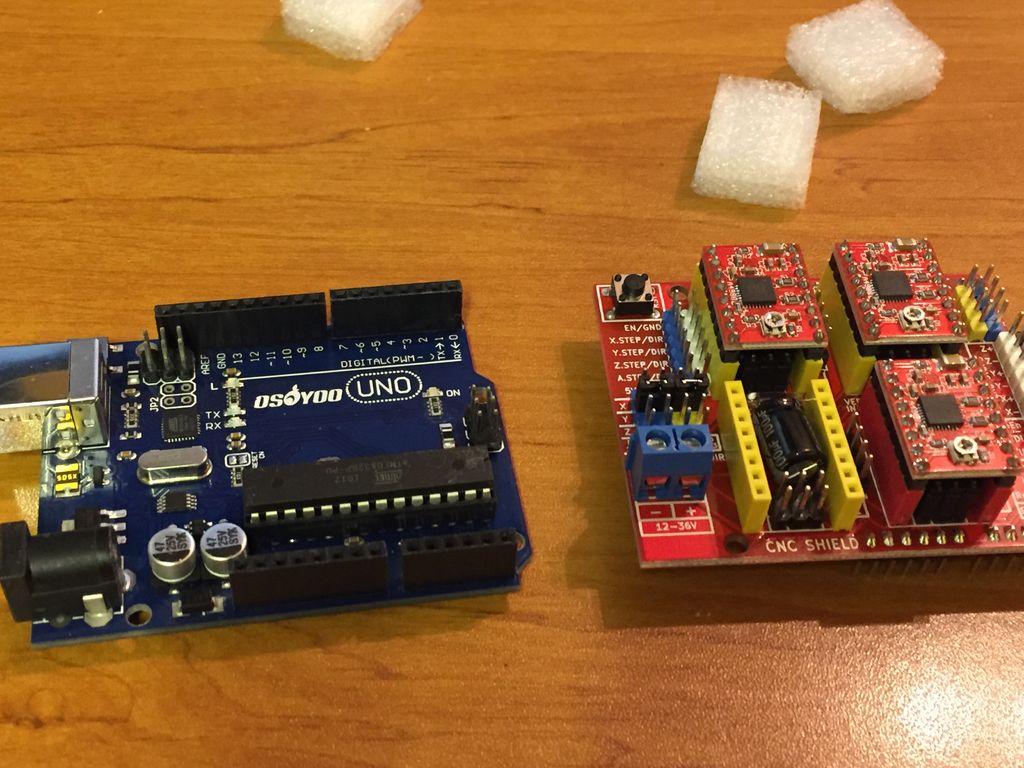
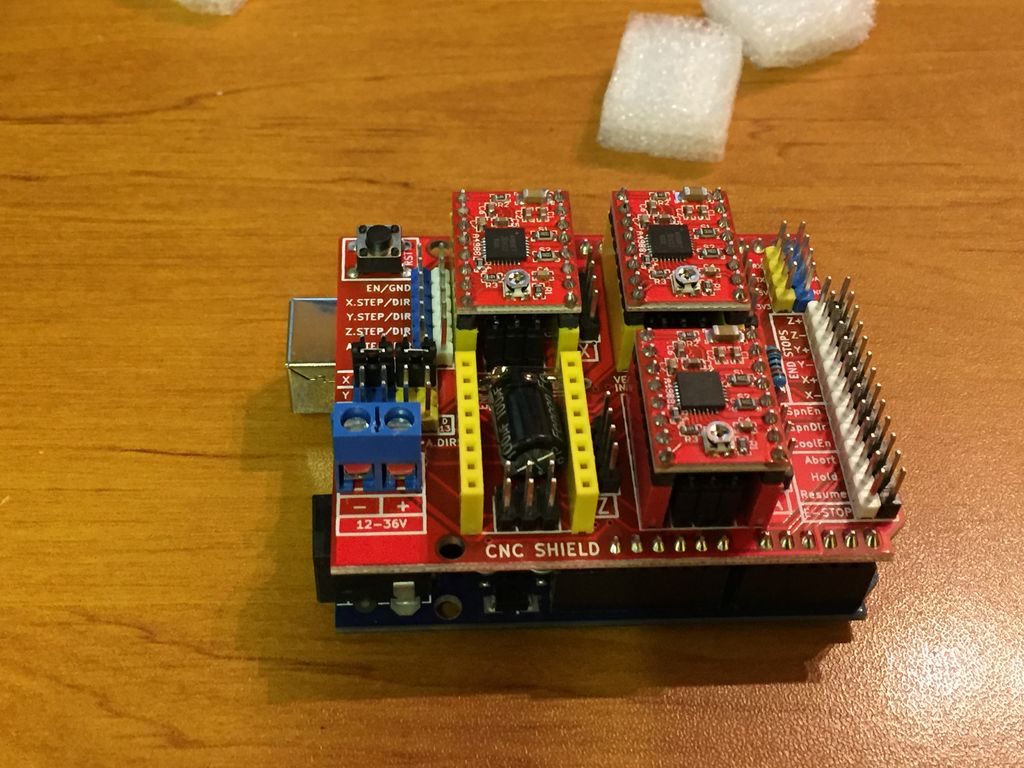
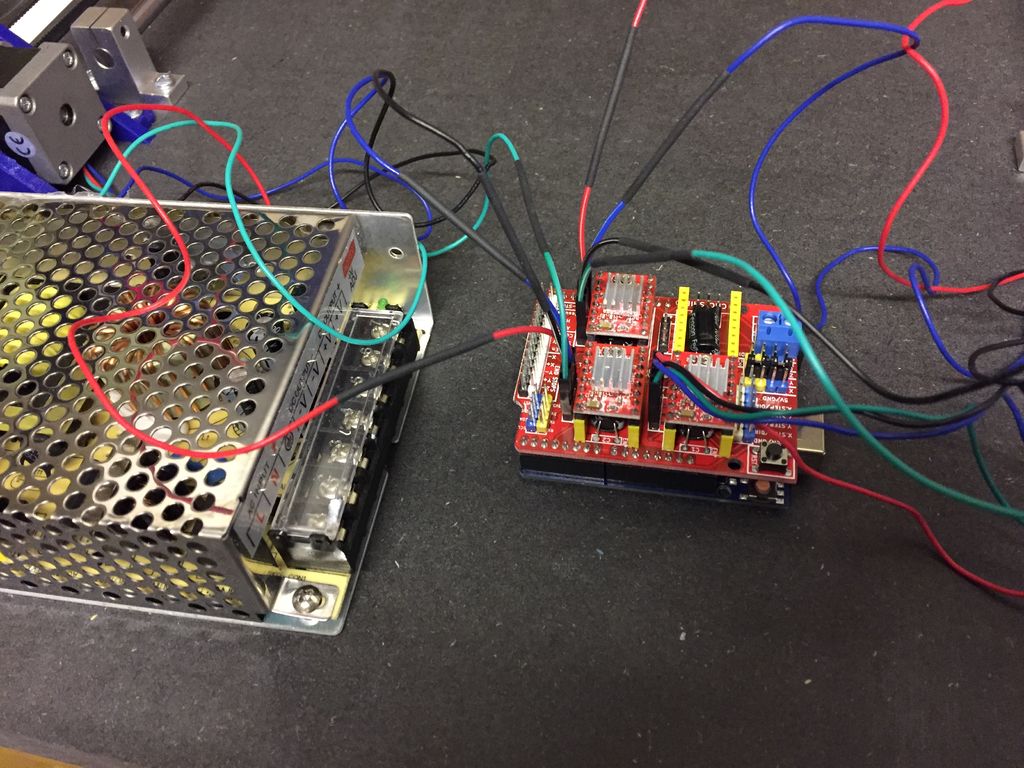
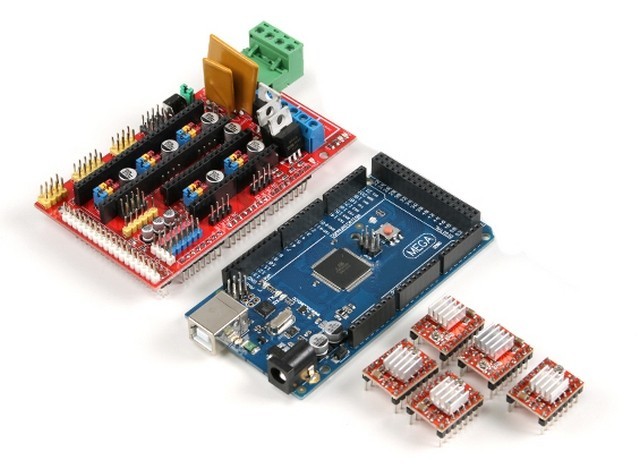
- 3 привода электродвигателя
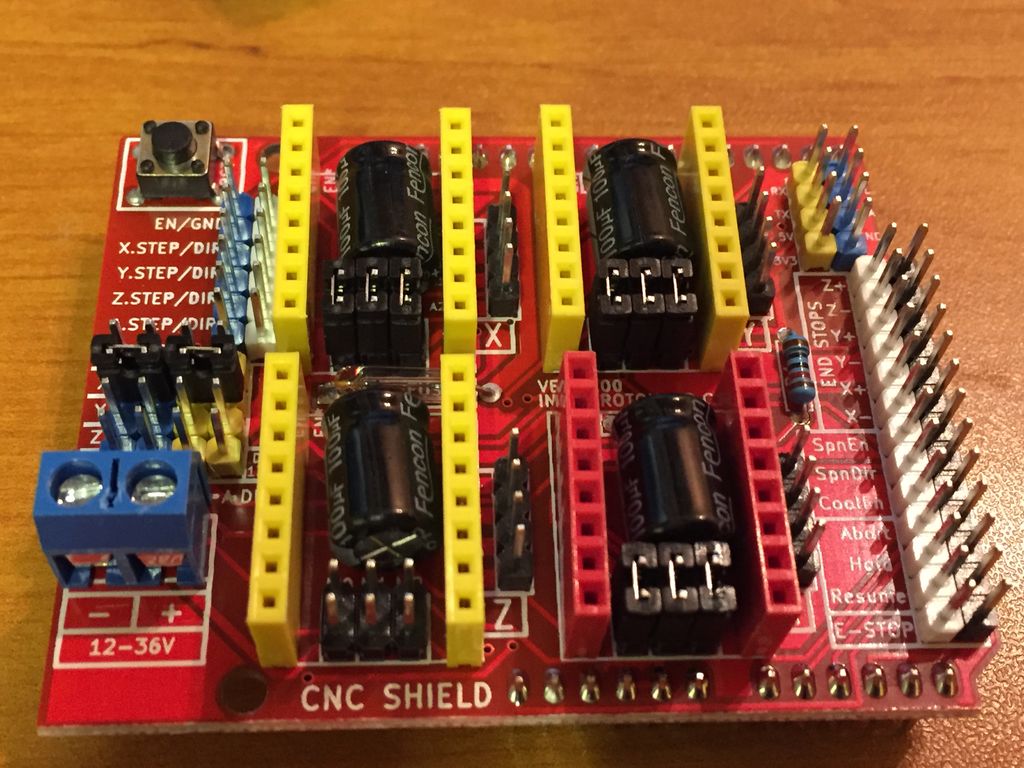
- шилд CNC
- 11 перемычек (обычно идут в комплекте с шилдом)
- Плата Arduino
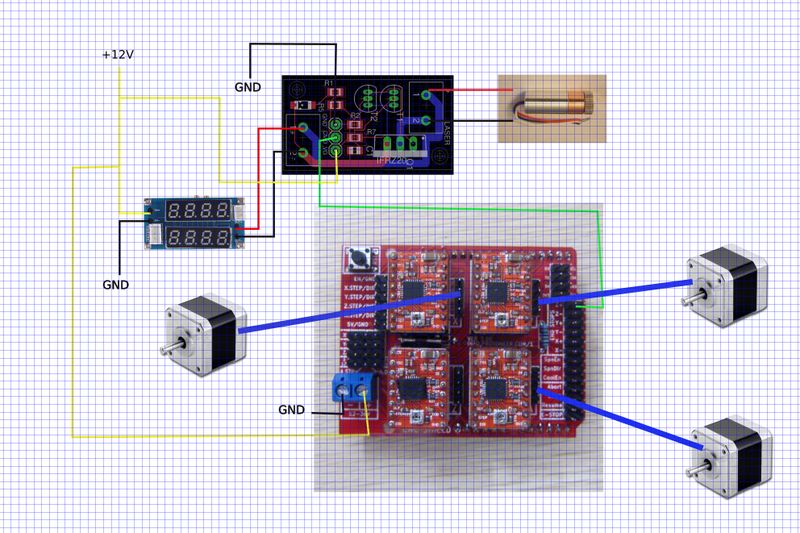
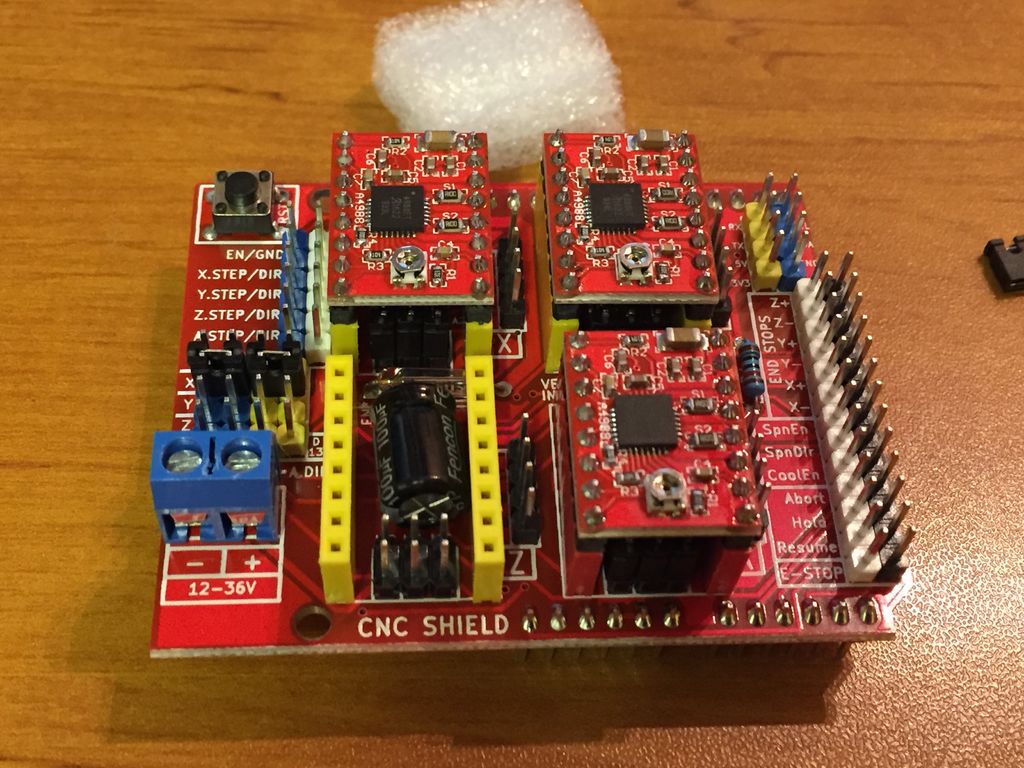
- установите перемычки так, как это показано на фотографии 2. Это позволит установить двигатели на микрошаг 16 и клонировать ось Y на А.
- подключите приводы к плате Arduino.
Шаг 18
Электроника: теплоотвод шагового двигателя
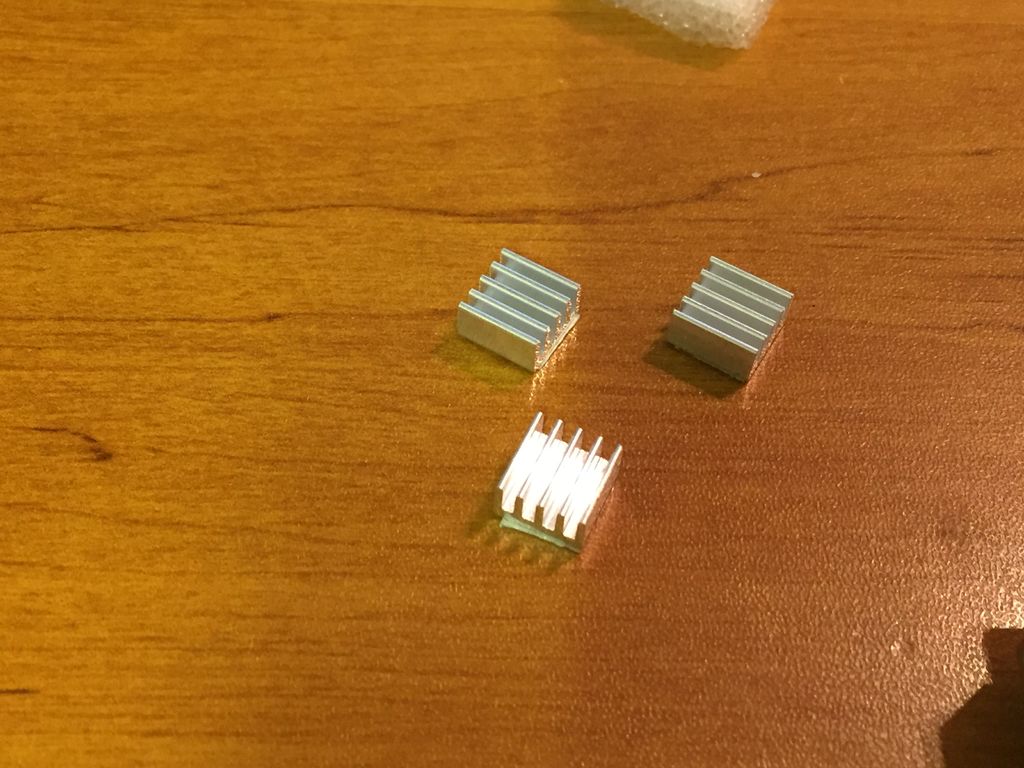
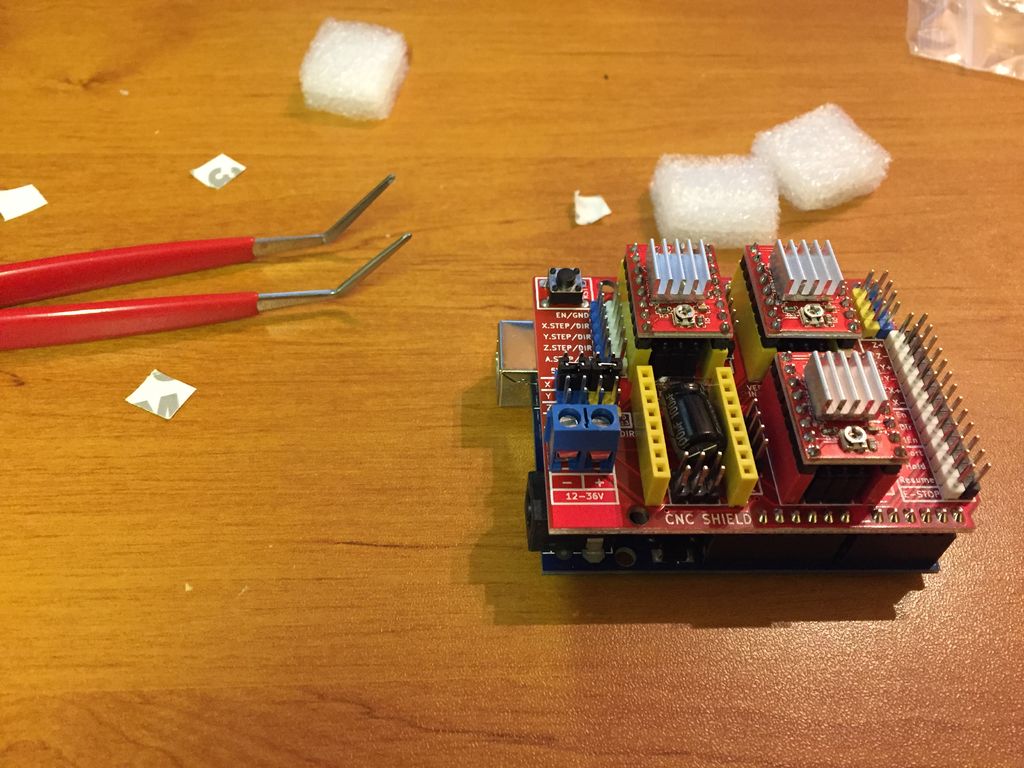
Вам нужен радиатор, без него двигатель будет пропускать шаги.
Шаг 19
Электроника: паяем коннекторы к проводам двигателей
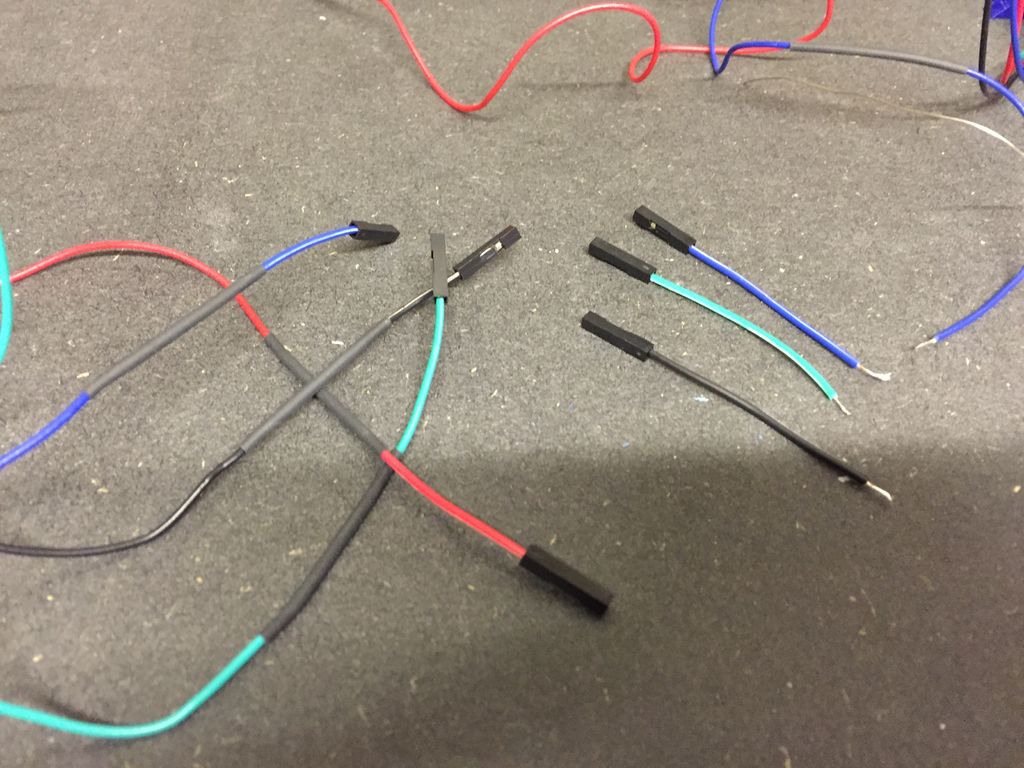
Можно купить готовые коннекторы и соединить двигатели с шилдом CNC, но нужно будет ждать доставку и это не так просто.
Я предпочитаю купить готовые коннекторы мама-мама, разрезать их на две части и спаять с шилдом…
Шаг 20
Электроника: пробный запуск
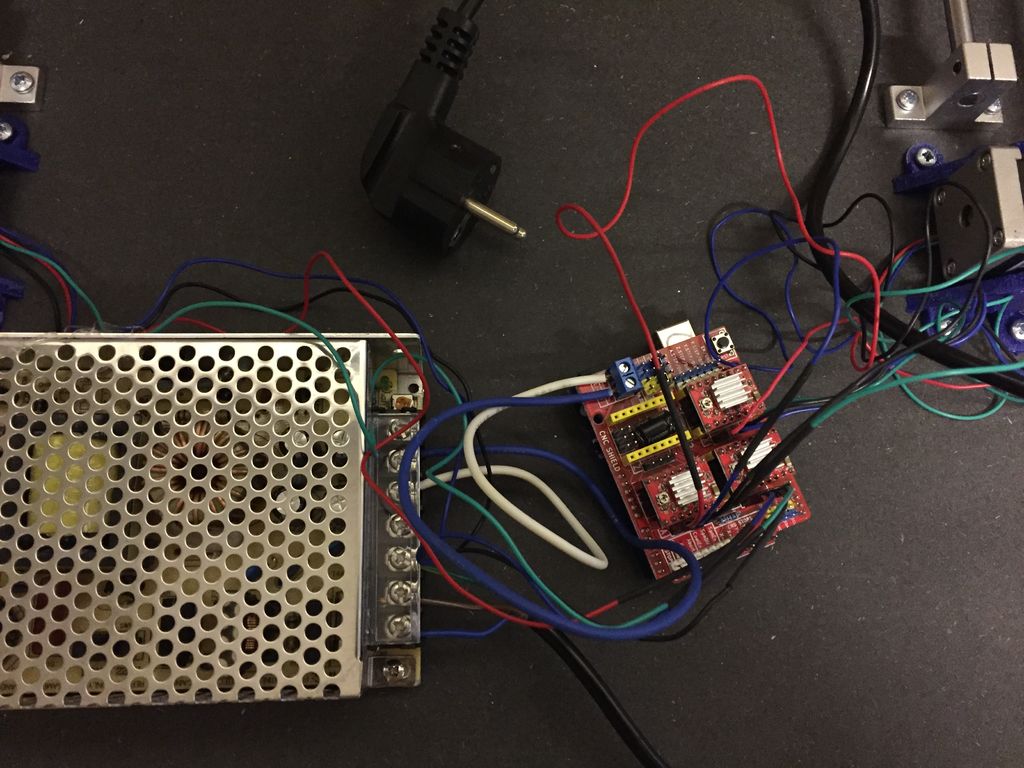
Пришло время провести испытание:
- подключите двигатели к шилду CNC
- включите питание
- загрузите GRBL на Arduino и заставьте механизм двигаться
Если механизм работает, пора приступать к следующему шагу.
Шаг 21
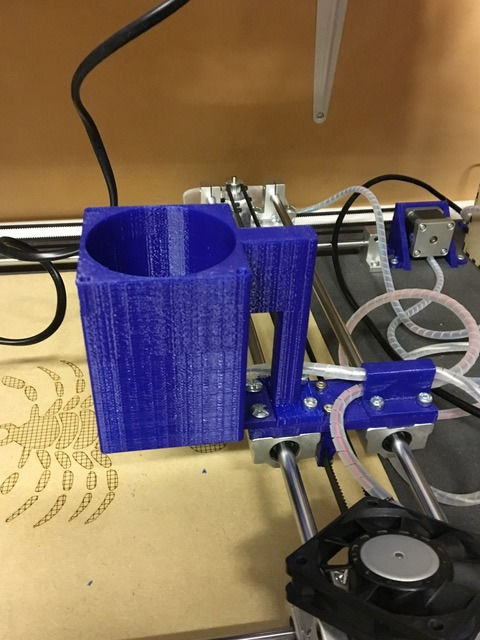
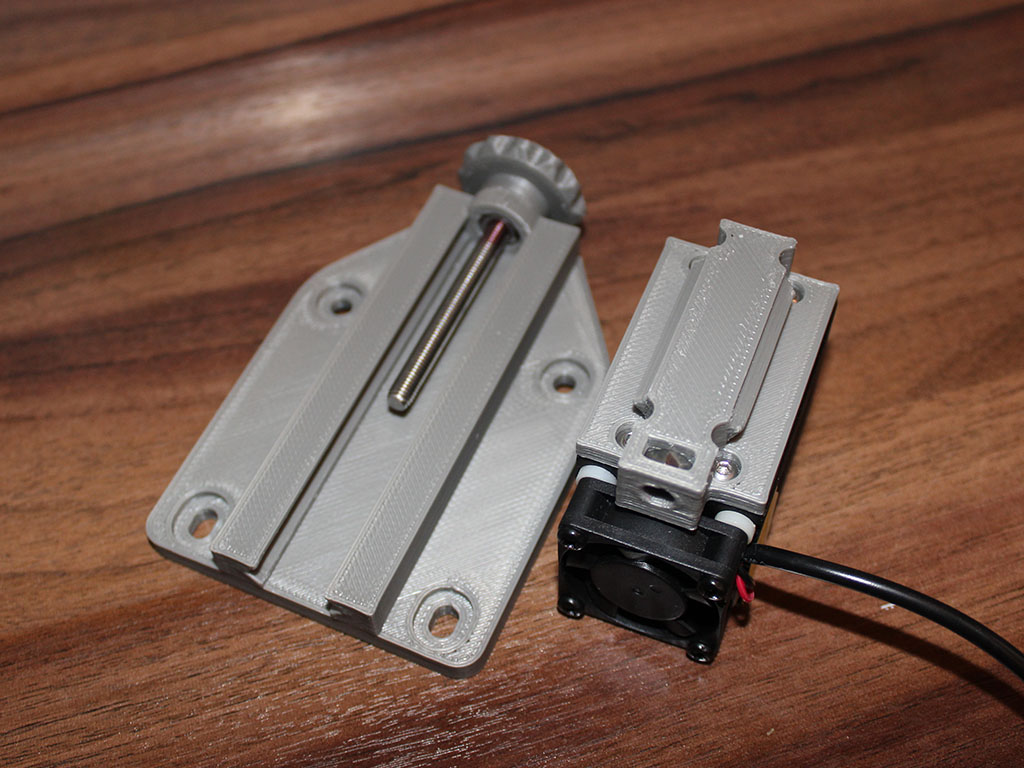
Устанавливаем крепление лазера
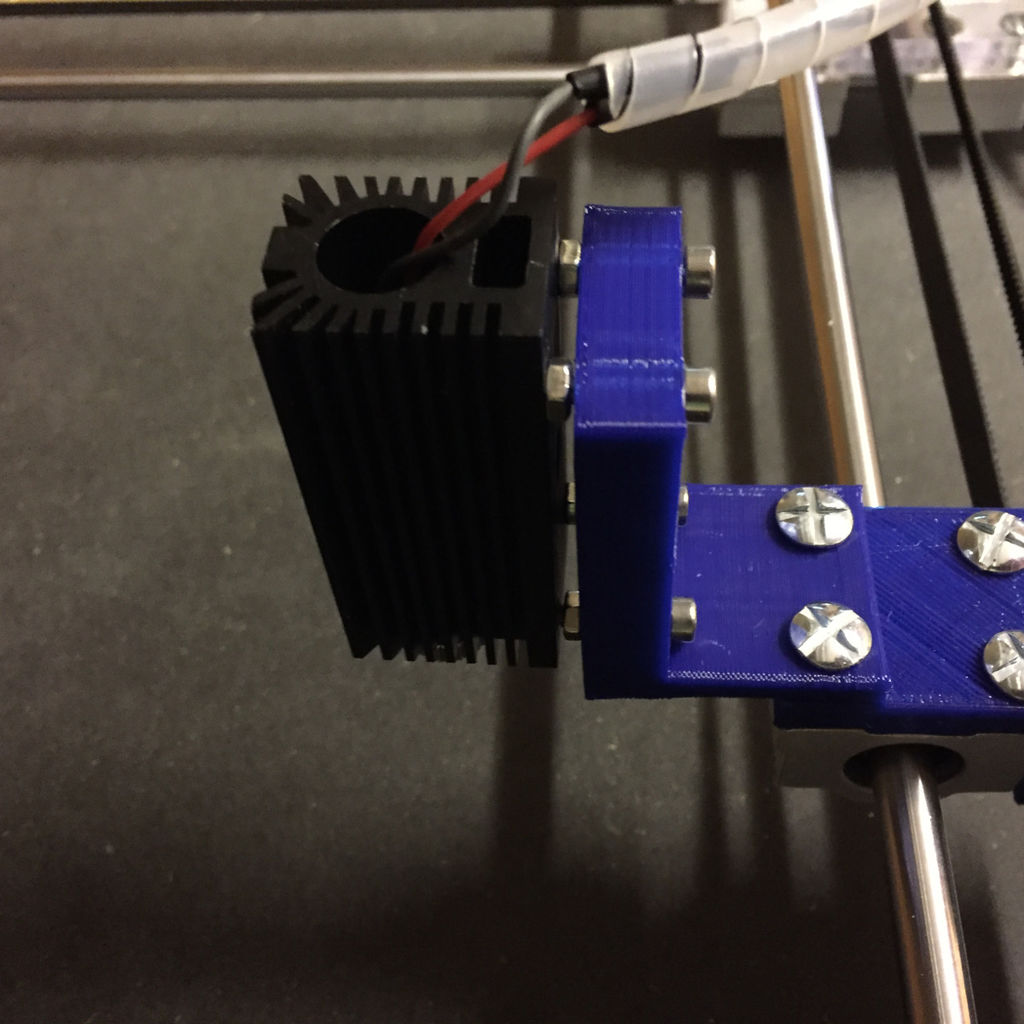
- напечатанное на 3Д-принтере крепление для лазера
- 4 винта М3 с гайками
- радиатор
- лазерный модуль
Радиатор не должен соприкасаться с креплением лазера, так как оно пластиковое, а радиатор сильно нагревается.
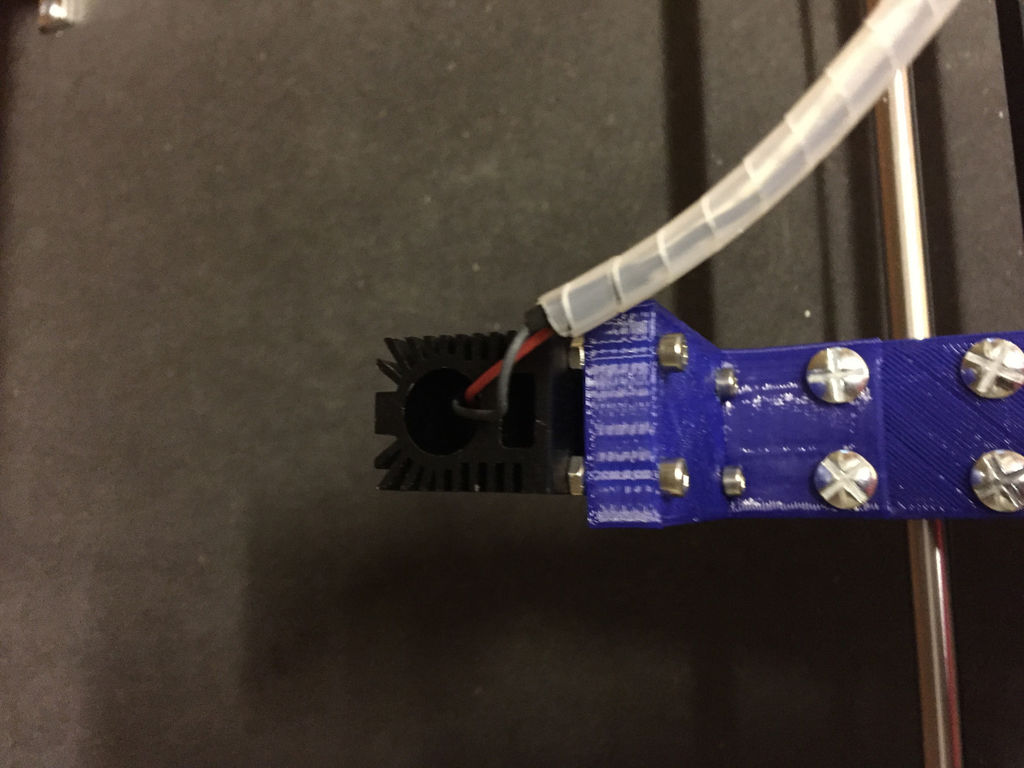
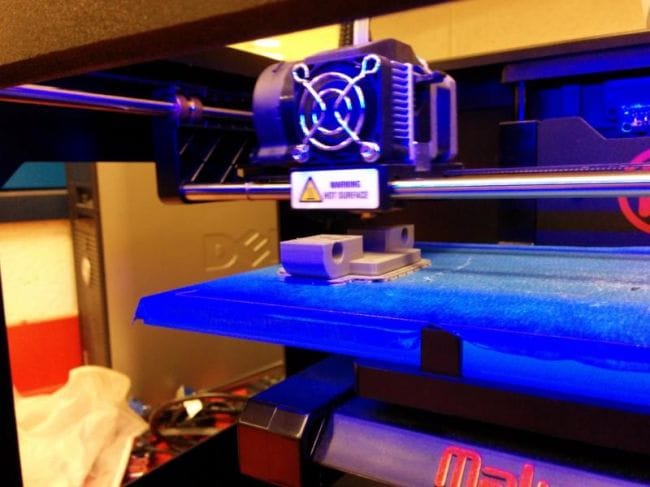
Шаг 22
Устанавливаем крепление вентилятора
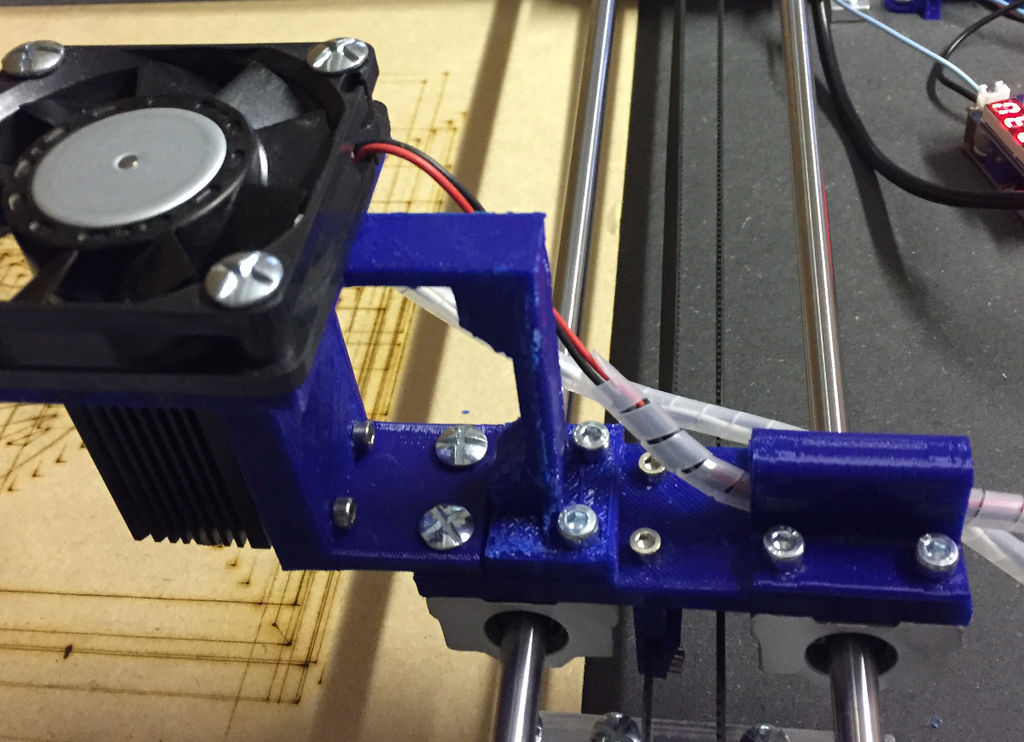
- напечатанное на 3Д-принтере крепление вентилятора
- 4 винта М4
- вентилятор
Теперь сделайте следующее:
- просверлите 4 отверстия в креплении
- вставьте винты в отверстия
- закрепите вентилятор
Шаг 23
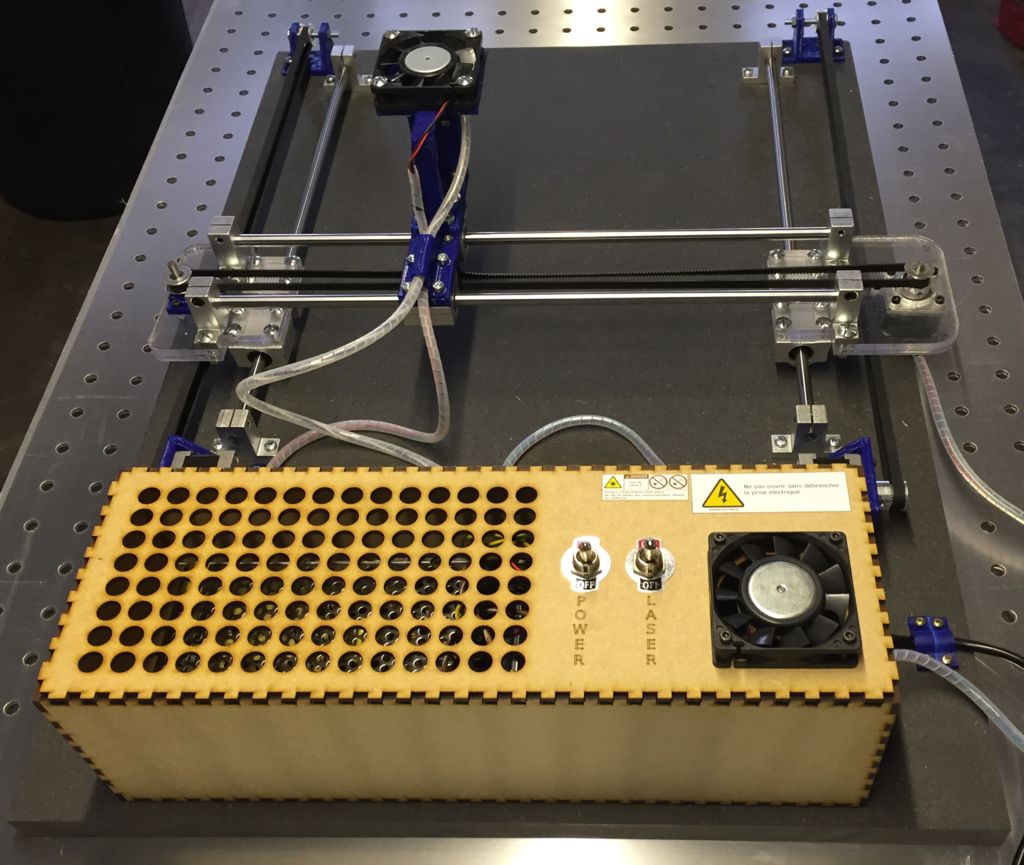
Корпус с прорезями, сделанными лазером, я сделал с помощью он-лайн программы MakerCase.
Шаг 24




Шаг 25
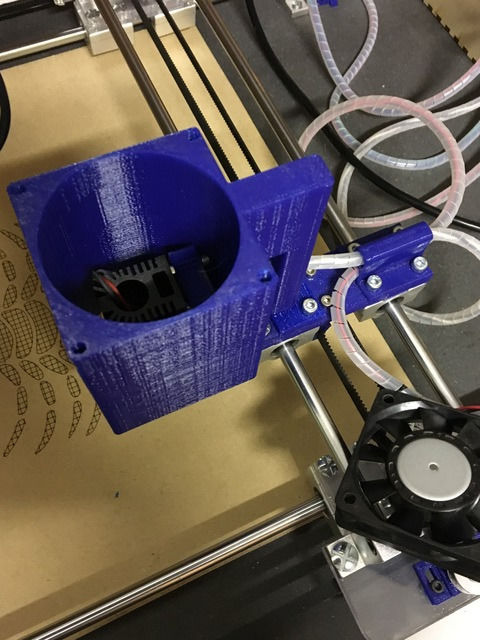

Я доработал крепление вентилятора для лучшего охлаждения, файл STL приложен. Просто напечатайте крепление на 3Д-принтере и замените им старое крепление.
Шаг 26
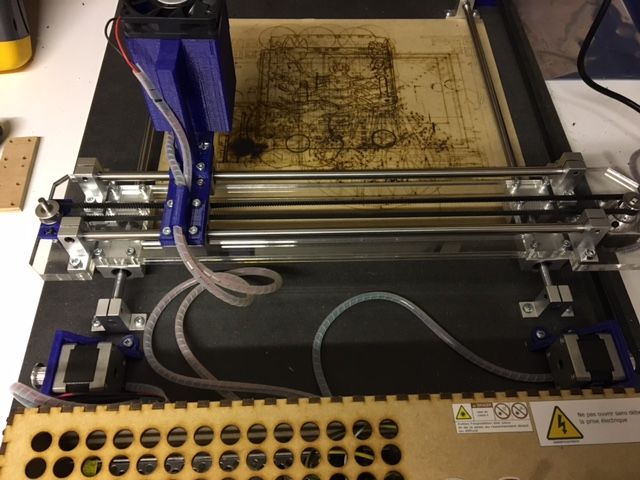
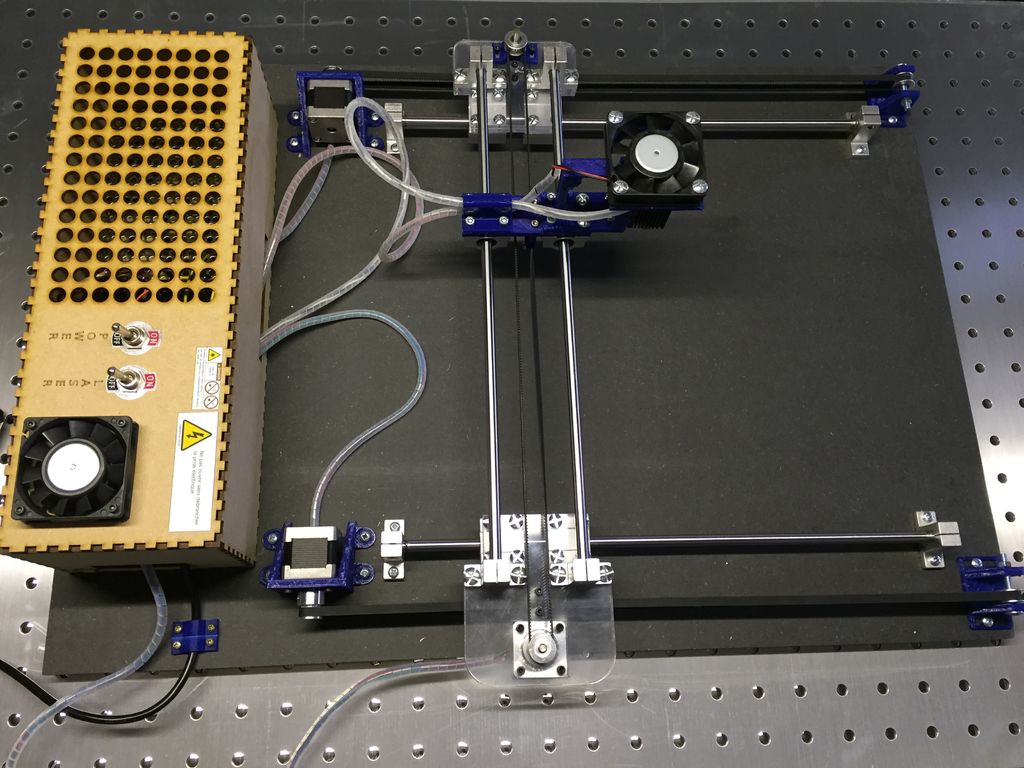
Я усилил ось Y, чтобы увеличить точность на ней. Также я заметил, что ось Х получилась более точной, и не могу найти этому причину.
Усиление не очень работает, но после него для нормальной работы по оси Y хватает одного мотора, поэтому левый мотор я снял.
Новое испытание показало, что после изменений работа по оси Y стала такой же точной, как и по оси Х.
Рекомендую такую доработку.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
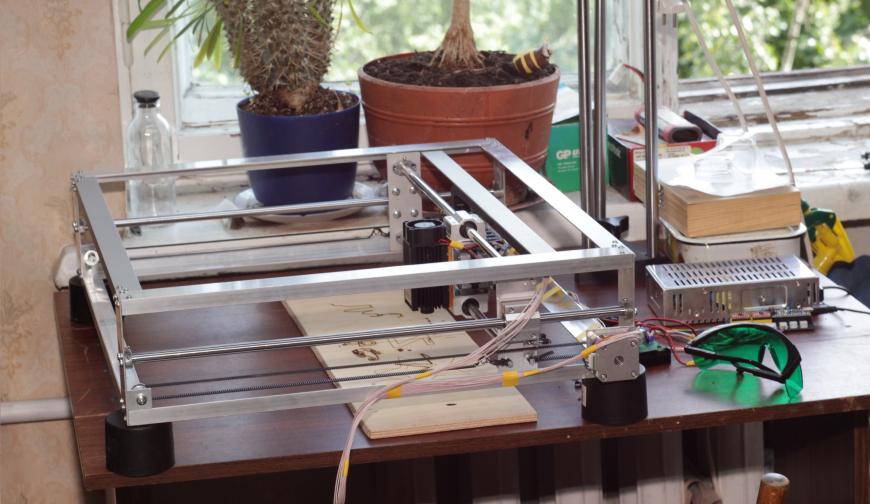
Лазерный гравер на Arduino своими руками
На сборку такого гравера у автора ушло 4 месяца, его мощность составляет 2 Ватта. Это не слишком много, но вполне позволяет делать гравировку на дереве и пластике. Также устройство может резать пробковое дерево. В статье имеется весь необходимый материал для создания гравера, включая STL файлы для распечатки узлов конструкции, а также электронные схемы для подключения двигателей, лазеров и так далее.
Видео работы гравировщика:
Материалы и инструменты:
— доступ к 3D-принетру;
— стержни из нержавеющей стали 5/16″;
— бронзовые втулки (для подшипников скольжения);
— диод М140 на 2 Вт;
— радиатор и кулеры для создания охлаждения диода;
— шаговые двигатели, шкивы, зубчатые ремни;
— суперклей;
— деревянный брус;
— фанера;
— болты с гайками;
— акрил (для создания вставок);
— линза G-2 и драйвер;
— термопаста;
— защитные очки;
— контроллер Arduino UNO;
— дрель, режущий инструмент, саморезы и т.д.
Процесс изготовления гравера:
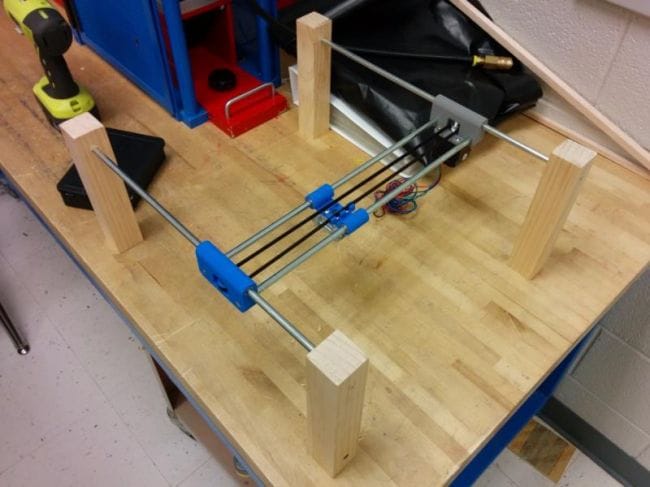
Шаг первый. Создаем ось Y
Сперва в Autodesk Inventor нужно разработать каркас принтера. Затем можно приступать к распечатке элементов оси Y и к ее сборке. Первая деталь, которая печатается на 3D-принтере, нужна для того, чтобы установить шаговый мотор на ось Y, подключить стальные валы и обеспечить скольжение вдоль одного из валов оси Х.
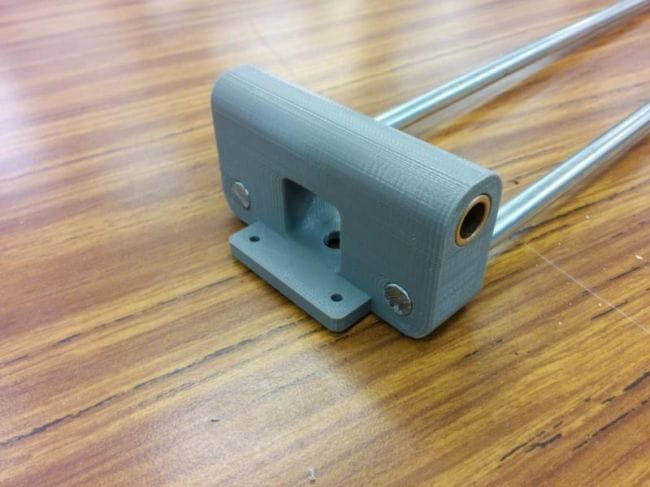
После того как деталь будет распечатана, в нее нужно установить две бронзовые втулки, они используются в качестве опор скольжения. Чтобы снизить трение втулки нужно смазать. Это отличное решение для подобных проектов, поскольку обходится дешево.
Что касается направляющих, то они сделаны из стрежней нержавеющей стали диаметром 5/16″. Нержавейка имеет небольшой коэффициент трения с бронзой, поэтому отлично подходит для подшипников скольжения.
На ось Y также устанавливается лазер, он имеет металлический корпус и достаточно сильно греется. Чтобы снизить риск перегрева нужно установить алюминиевый радиатор и кулеры для охлаждения. Автор использовал старые элементы от контроллера робота.
Помимо всего прочего в блоке для лазера 1″Х1″ нужно сделать отверстие 31/64″ и добавить болт к боковой грани. Блок соединяется с другой деталью, которая тоже напечатана на 3D-принтере, она будет перемещаться по оси Y. Для передачи движения используется зубчатый ремень.
После сборки модуля лазера он устанавливается на оси Y. Также на этом этапе устанавливаются шаговые двигатели, шкивы и зубчатые ремни.
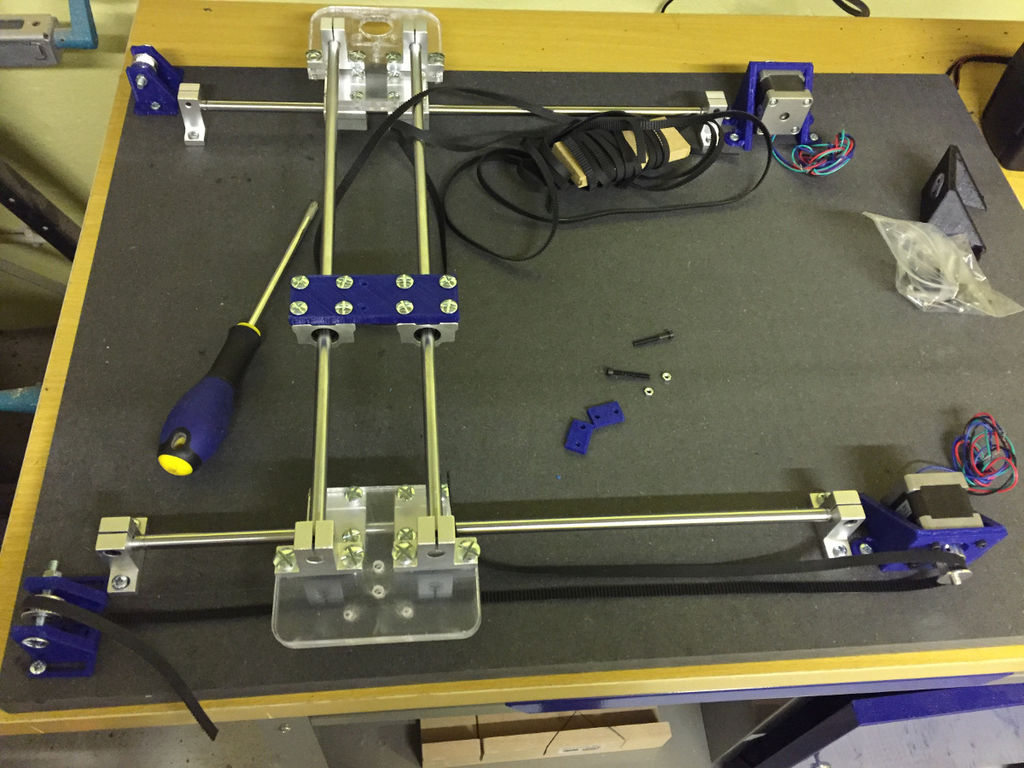
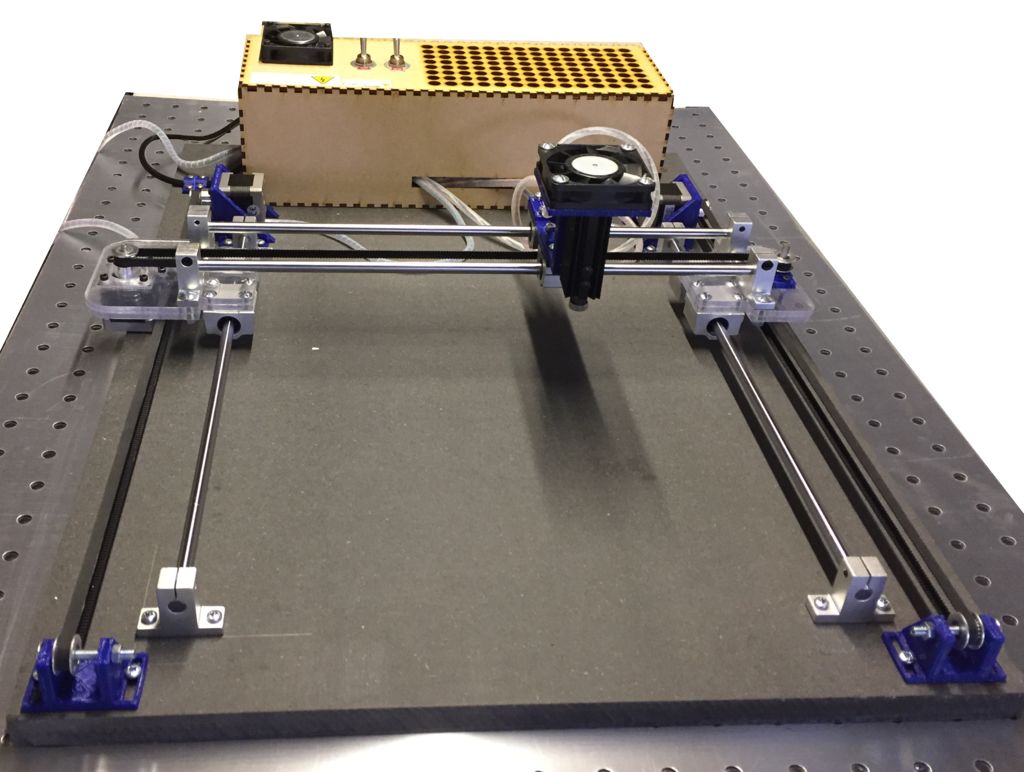
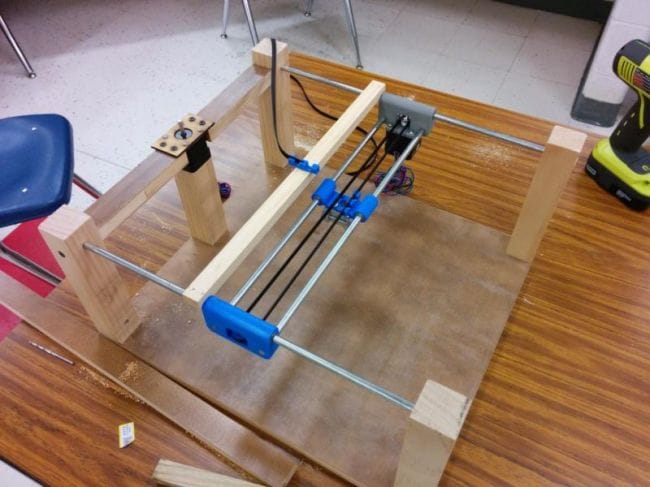
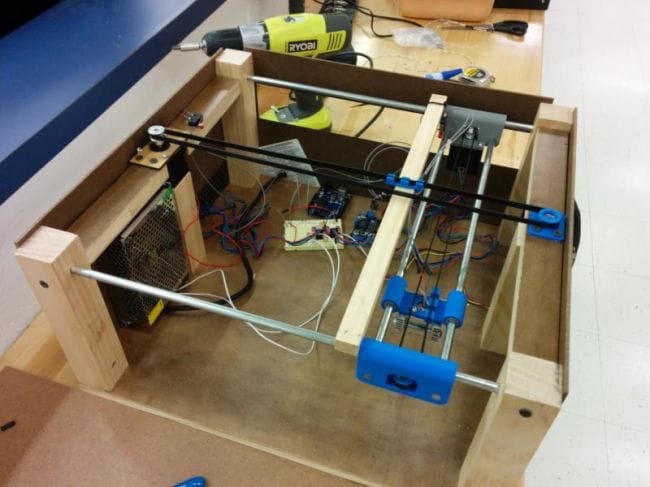
Шаг второй. Создаем ось X
Для создания основания гравера использовалось дерево. Самое главное при этом, чтобы две оси X находились четко параллельно, иначе устройство будет клинить. Для перемещения вдоль координаты X используется отдельный мотор, а также приводной ремень в центре по оси Y. Благодаря такой конструкции система получилась простая и отлично работает.
Для крепления поперечной балки, которая соединяет ремень с осью Y, можно использовать суперклей. Но лучше всего для этих целей распечатать на 3D-принтере специальные кронштейны.
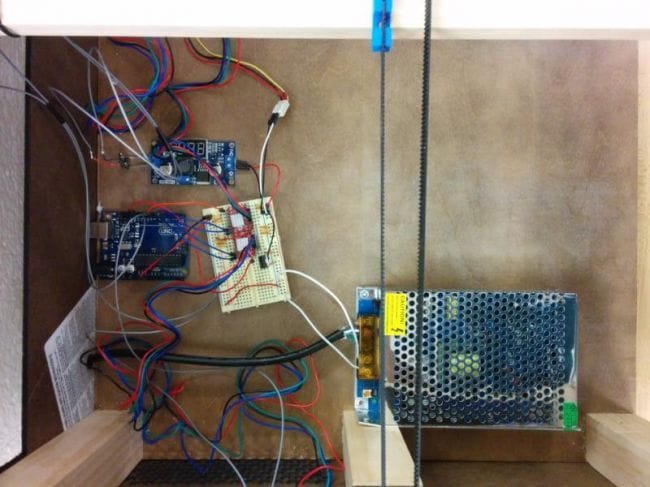
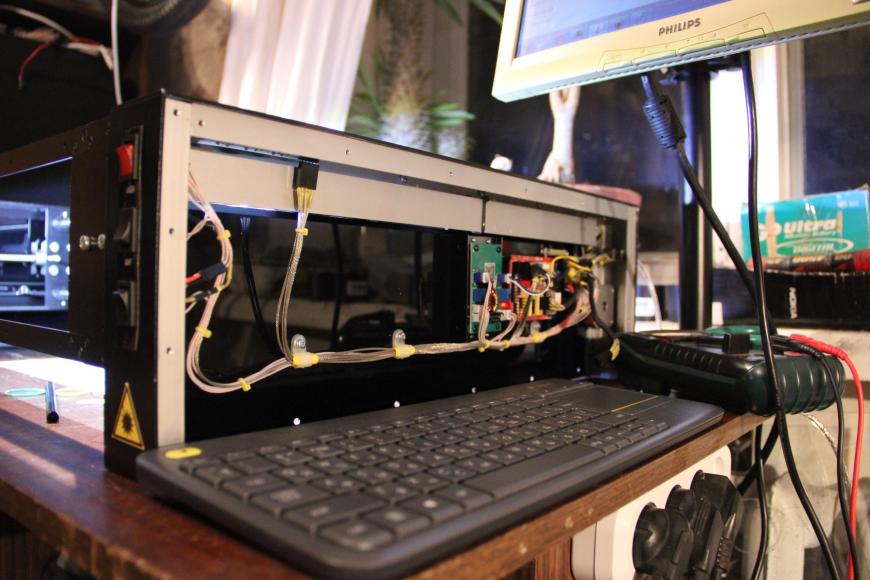
Шаг третий. Подключаем и проверяем электронику
В самоделке используется диод типа диод M140, можно купить и более мощный, но цена будет выше. Для фокусировки луча понадобится линза и источник регулируемого питания. Линза устанавливается на лазер с помощью термопасты. Работать с лазерами нужно исключительно в защитных очках.
Чтобы проверить, как работает электроника, автор включил ее вне станка. Для охлаждения электроники используется компьютерный кулер. Работает система на контроллере Arduino Uno, который связан с grbl. Чтобы сигнал можно было передавать в режиме онлайн, используется Universal Gcode Sender. Чтобы преобразовать векторные изображения в G-код, можно использовать Inkscape с установленным плагином gcodetools. Для управления лазером используется контакт, который контролирует работу шпинделя. Это один из самых простых примеров с применением gcodetools.
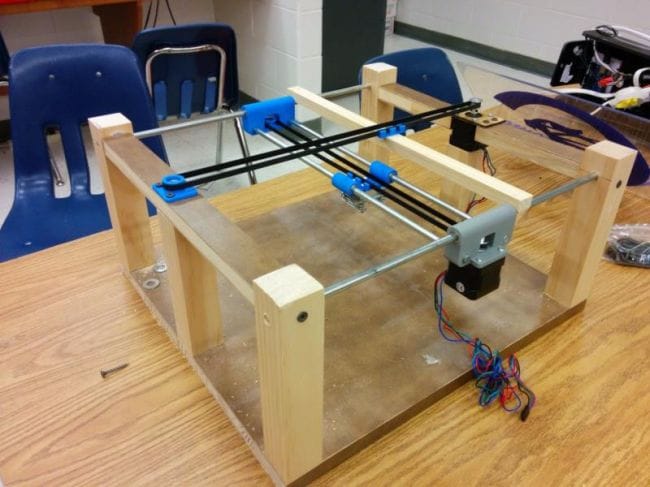
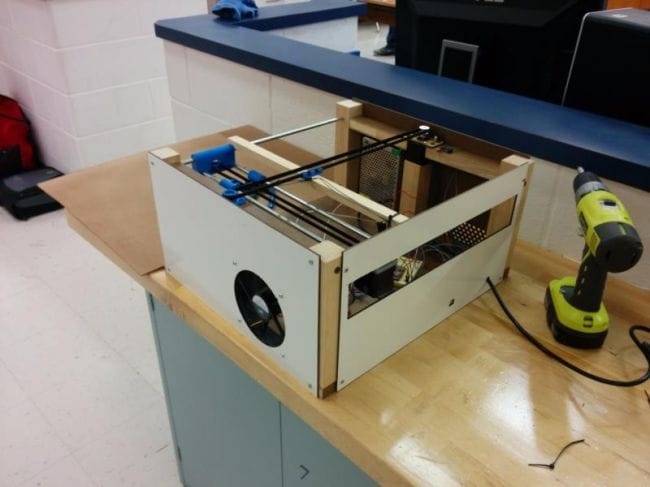
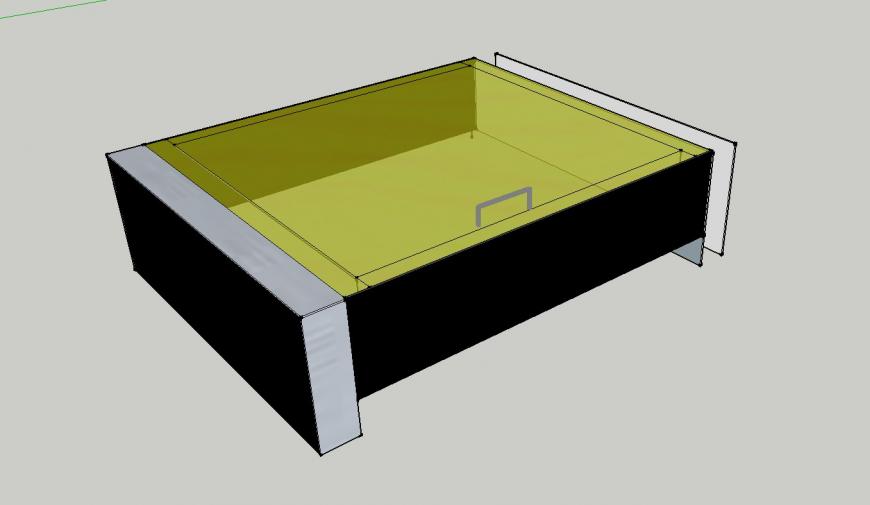
Шаг четвертый. Корпус гравировщика
Боковые грани делаются из фанеры. Поскольку шаговый двигатель при работе немного выходит за пределы корпуса, в задней грани нужно сделать прямоугольное отверстие. Помимо этого нужно не забыть сделать отверстия для охлаждения, подключения питания, а также USB порта. Края верхней и передней части корпуса также изготавливаются из фанеры, в центральную часть устанавливаются стенки из акрила. Над всеми элементами, которые установлены в нижней части бокса, крепится дополнительная платформа из дерева. Она является базой для материала, с которым работает лазер.
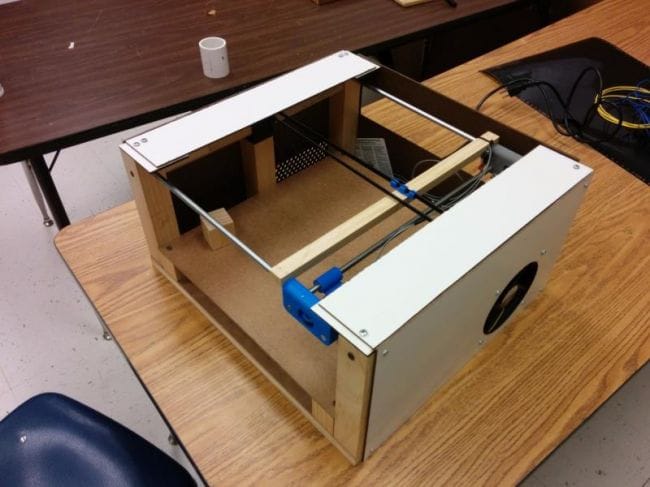
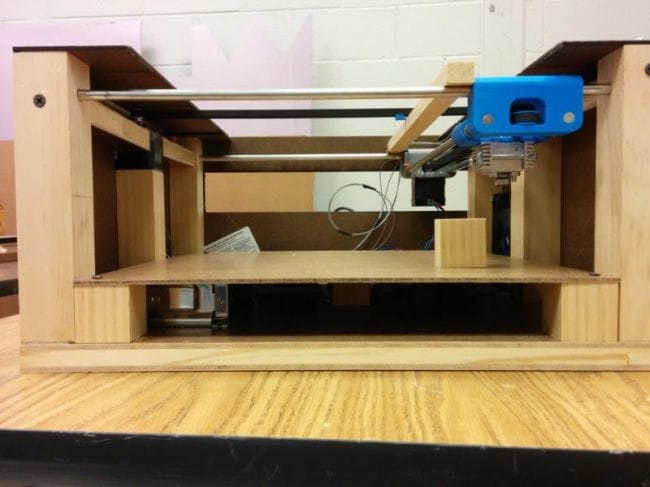


Для изготовления стенок используется акрил оранжевого цвета, так как он отлично поглощает лучи лазера. Важно помнить, что даже отраженный луч лазера может серьезно повредить глаз. Вот, собственно, и все, лазер готов. Можно приступать к испытаниям.
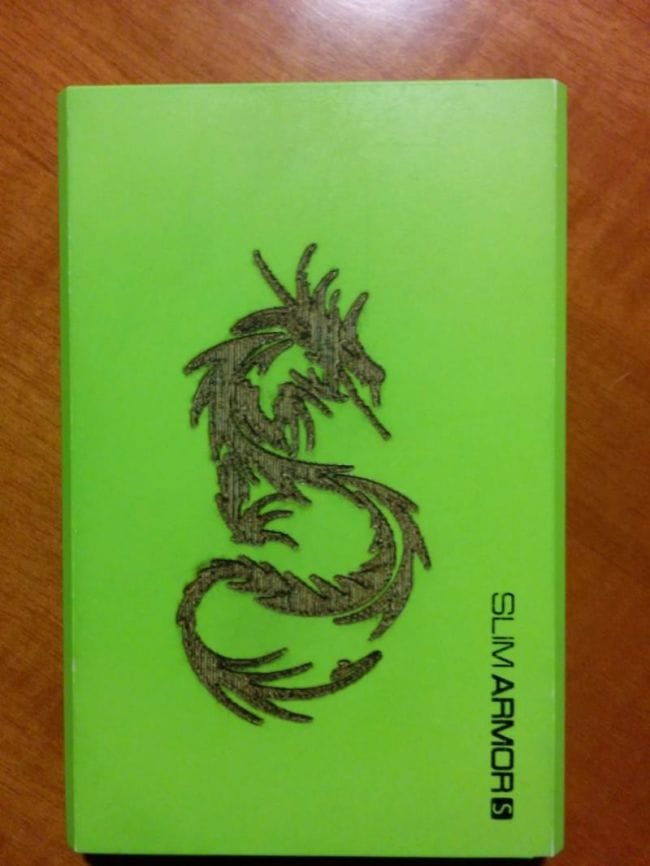
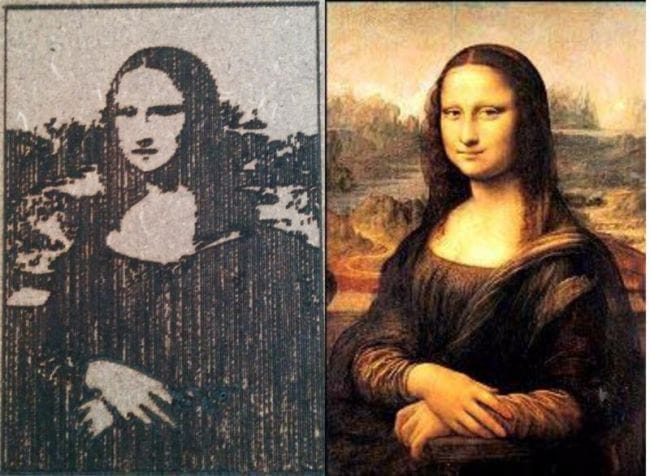
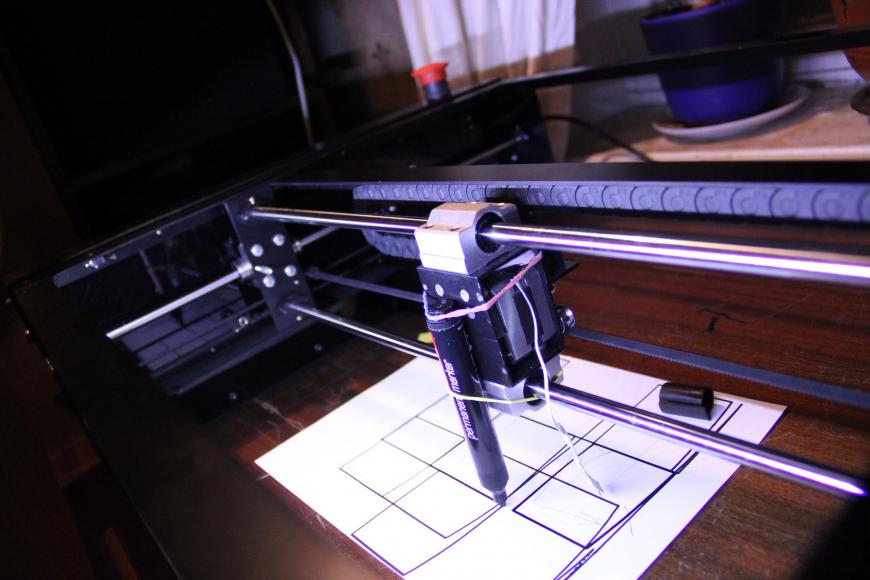
Конечно, сложные изображения получаются не очень качественные, но вот простые гравировщик выжигает без труда. Также с помощью него можно без проблем резать пробковое дерево.



Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
ЖИЛЬЦОВ ДМИТРИЙ
ЛАЗЕРНЫЙ ГРАВЕР 2500 мВт СВОИМИ РУКАМИ
ВВЕДЕНИЕ
В предыдущей статье я описал опыт сборки и наладки гравера из китайского набора. Поработав с аппаратом, понял, что в моей лаборатории он будет не лишним. Задача поставлена, буду решать.
На горизонте два варианта решения — заказ набора в Китае и разработка собственной конструкции.
НЕДОСТАТКИ КОНСТРУКЦИИ С ALIEXPRESS
Как и писал в предыдущей статье, набор оказался вполне работоспособным. Практика работы со станком выявила следующие недостатки конструкции:
- Плохо проработана конструкция каретки. На видео в предыдущей статье это хорошо заметно.
- Ролики подвижных узлов крепятся на панелях винтами М5 и связаны с панелью только с одной стороны. При этом, как ни затягивай винты, остается люфт.
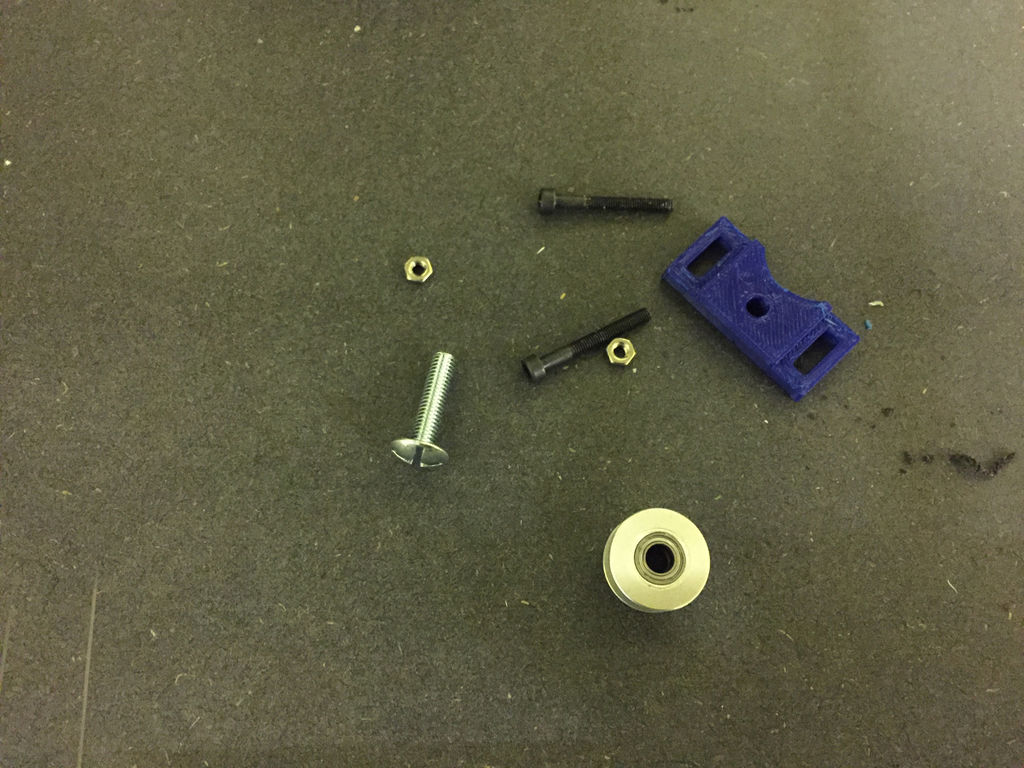
ПЛАСТИКОВЫЕ ДЕТАЛИ
Поскольку каркас из станочного профиля вполне достойный, устранить выявленные недостатки получилось переработав пластиковые детали.
Держатель лазера я достаточно хорошо описал в предыдущей статье. Также в конструкцию я добавил дополнительную деталь, связывающую все четыре ролика на правой и левой панелях. Деталь позволила исключить люфты при перемещении панелей.
Все детали имеют достаточно простые формы и не требуют поддержек и других сложностей при печати.
Для заказа набора пластиковых деталей необходимо перейти в интернет-магазин:
Модели пластиковых деталей для печати доступны:
ДЕМОНСТРАЦИЯ РАБОТЫ
Работу гравера и его внешний вид можно оценить в следующем видео.
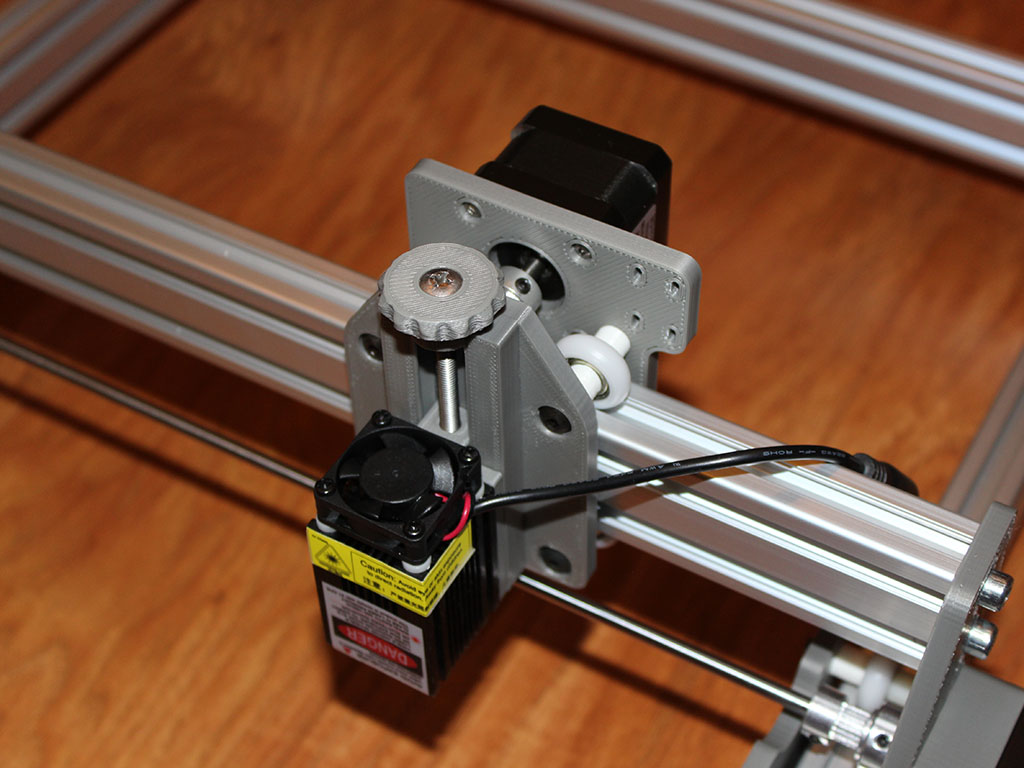
КОНСТРУКЦИЯ ГРАВЕРА
Каркас гравера построен на станочном алюминиевом профиле 20х40. Детали, несущие подвижные части гравера выполнены на 3D принтере. Подвижные части перемещаются на стандартных роликах. Каретка, несущая лазерный модуль позволяет регулировать высоту лазера над рабочим столом, что позволяет фокусировать мощность лазерного луча в достаточно большом диапазоне.
Сборка конструкции показана в формате 3D PDF.
СБОРКА
Конструкция весьма простая. По этой причине много времени и мучений на сборку не уйдет, если соблюдать рекомендованную последовательность сборки.
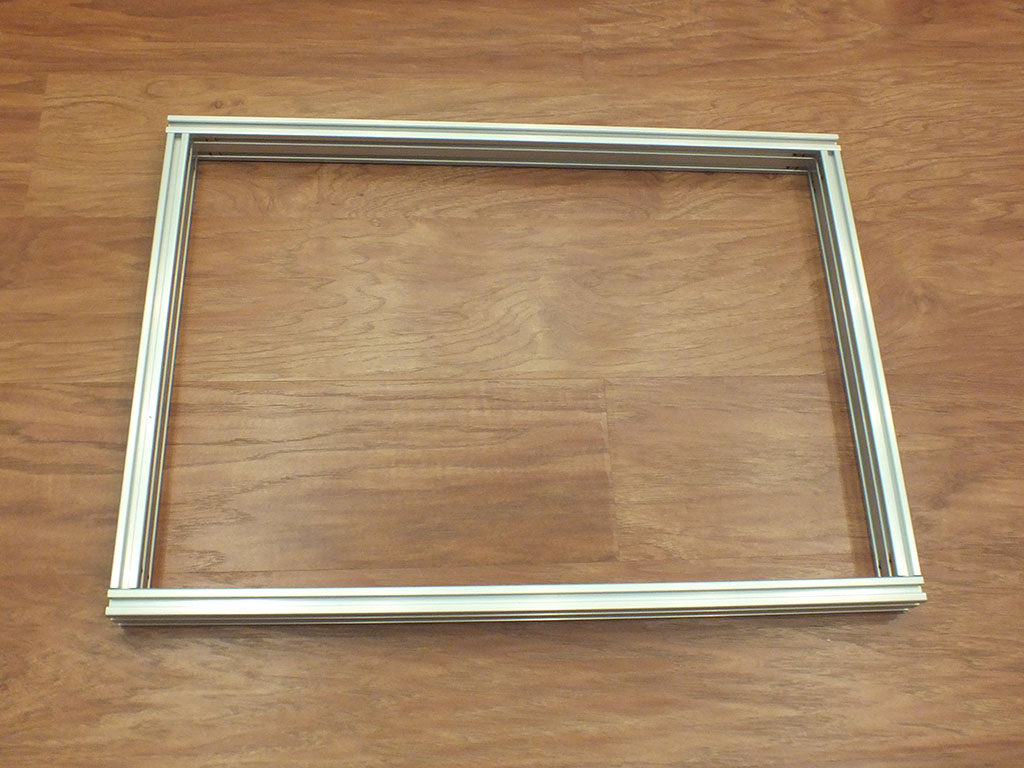
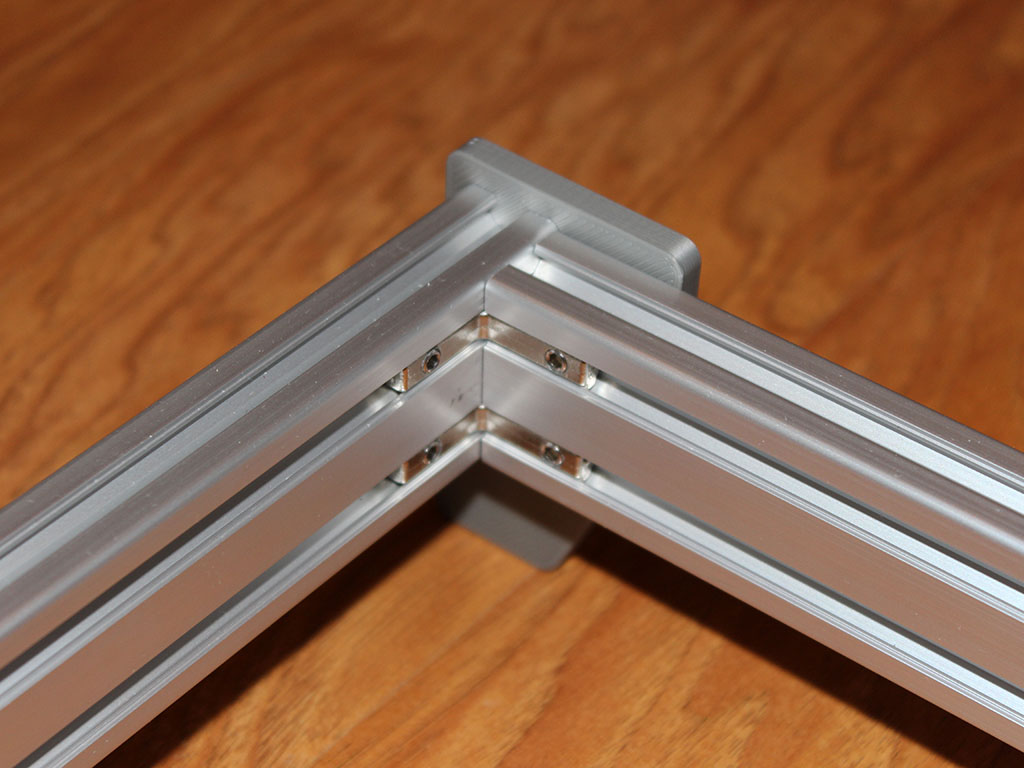
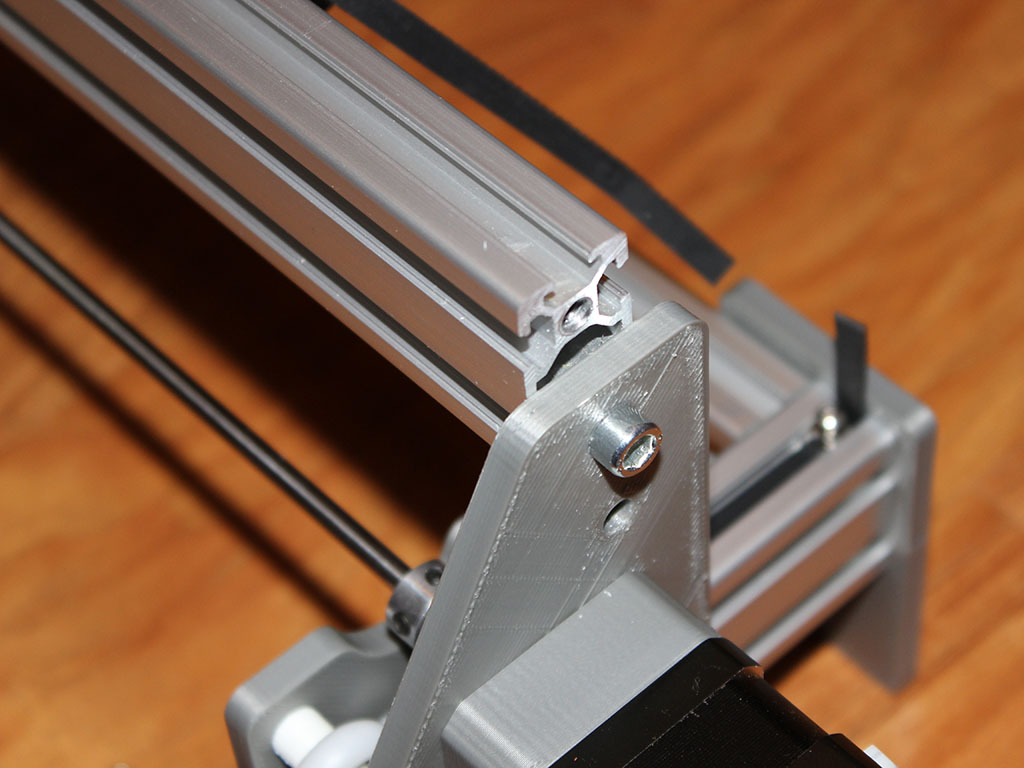
ШАГ 1. КАРКАС
Как описано выше, каркас построен из конструкционного профиля 20х40. Для скручивания профиля между собой используются внутренние уголки.

На более длинных деталях в центральных отверстиях торцов нарезана резьба для монтажа ножек и боковых панелей (на средней по длине).

Каркас скручивается на уголках, короткими деталями внутрь. На данном этапе не стоит до конца затягивать винты — сделать это лучше после установки ножек.
Ножки крепятся на винтах в четырех точках. Это сделано для того, чтобы каркас собирался без возможных перекосов.
Для начала потребуется закрепить все четыре ножки, снова не до конца затягивая крепеж.

Теперь необходимо найти максимально ровную поверхность! Выставить все детали таким образом, чтобы каркас «стоял» плотно, не играя на поверхности.

Протягиваем все крепежи, начиная с внутренних уголков и контролируя возможные перекосы угольником.
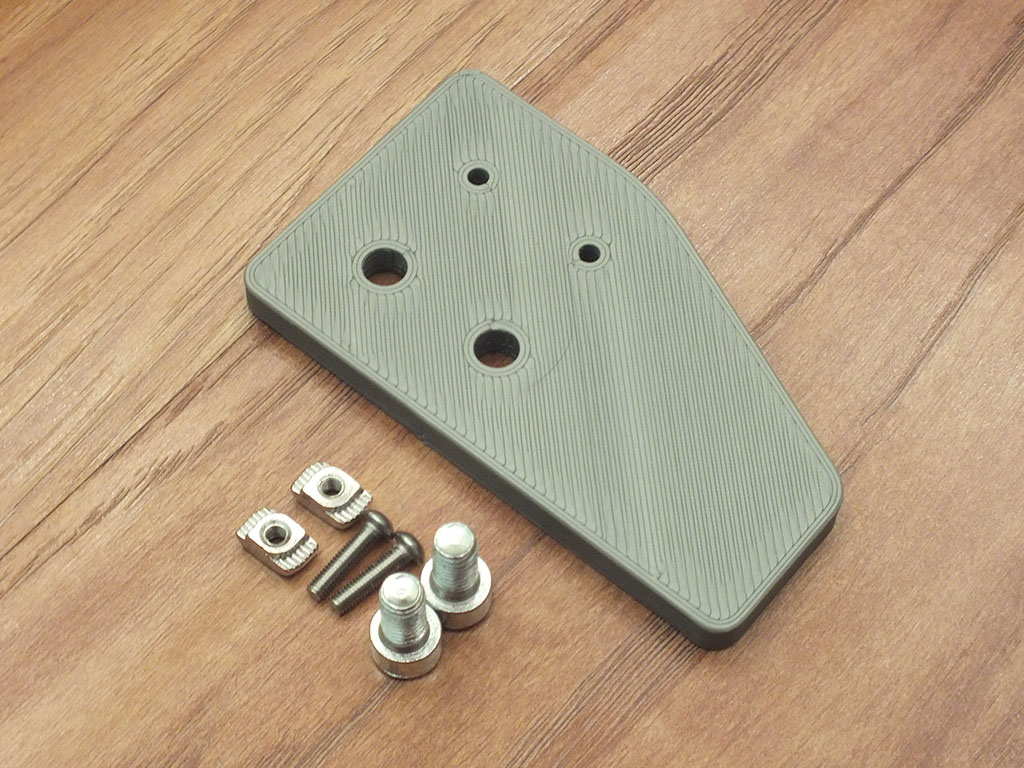
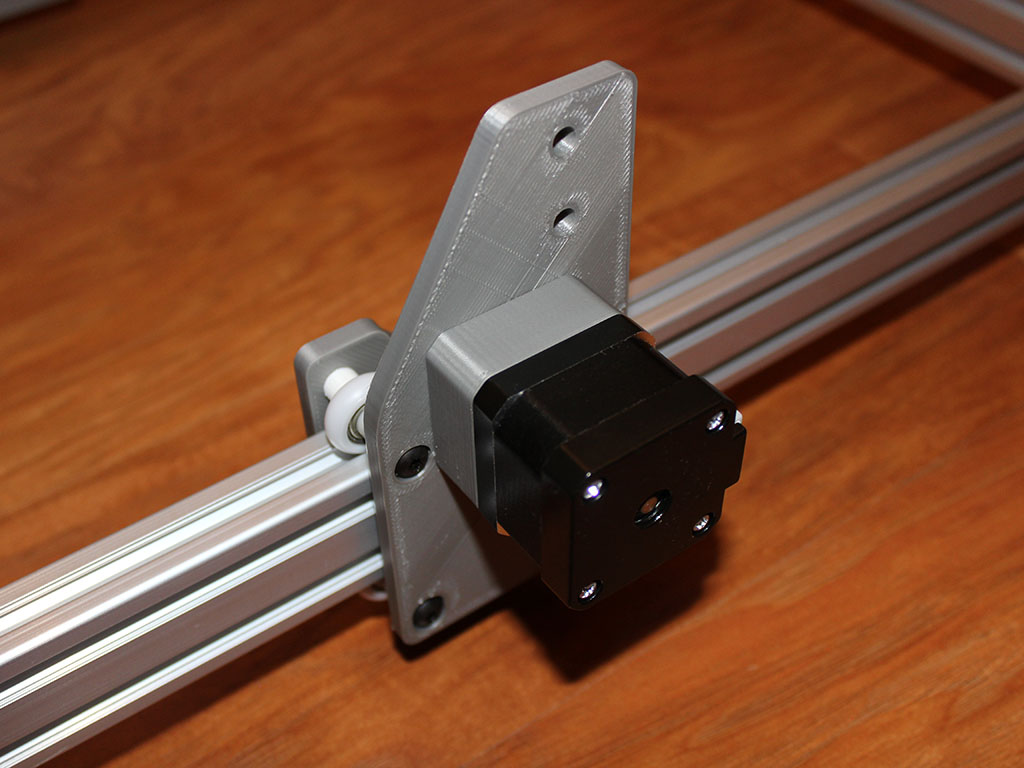
ШАГ 2. ПРАВАЯ ПАНЕЛЬ
Перед сборкой правой панели на вал двигателя необходимо установить гибкую муфту.
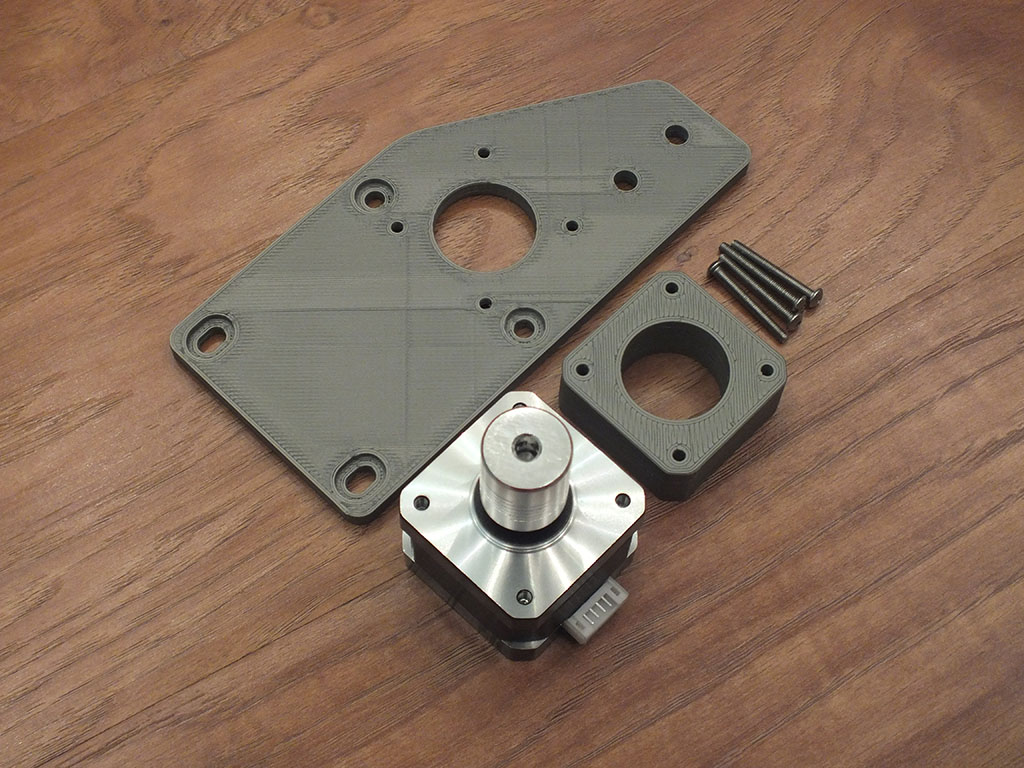
Затем необходимо прикрутить шаговый двигатель через проставку из пластика.
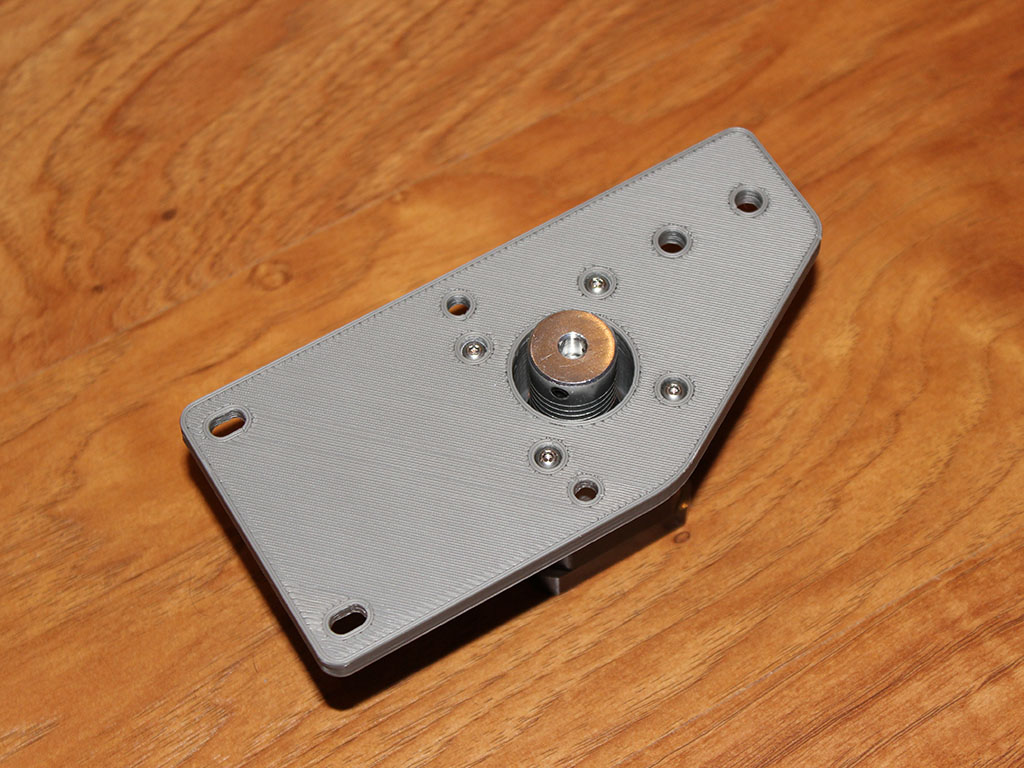
Положение кабельного вывода и проставка хорошо видны на рисунке ниже.

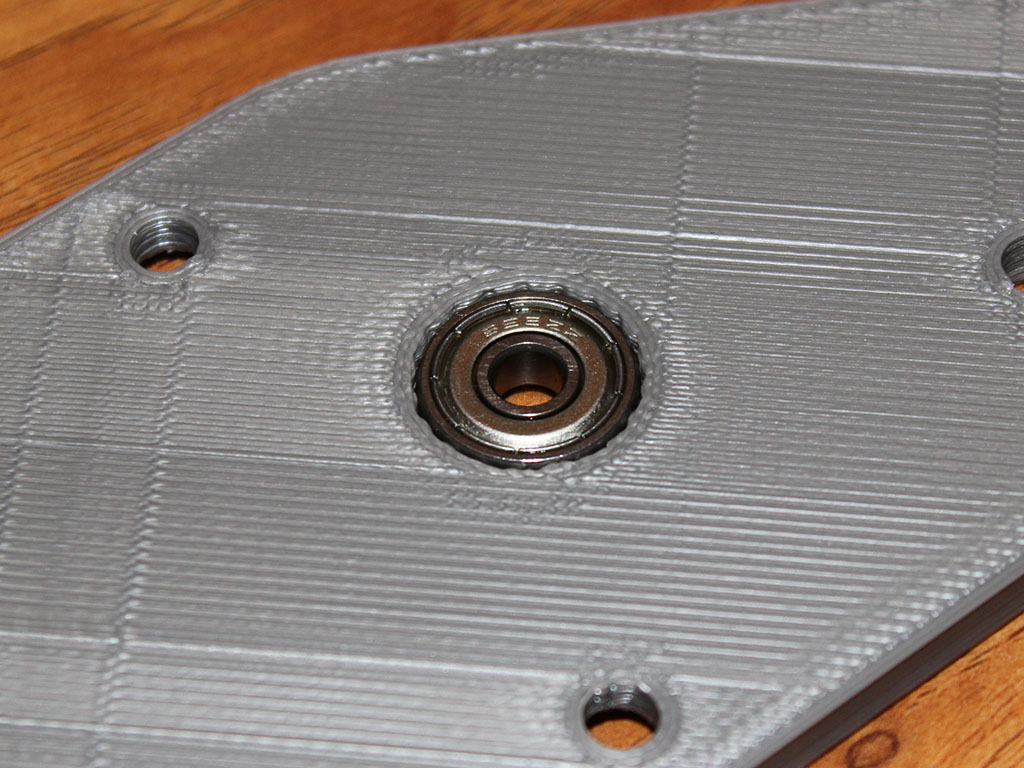
ШАГ 3. ЛЕВАЯ ПАНЕЛЬ
Для сборки левой панели потребуется только запрессовать подшипник в отверстие.
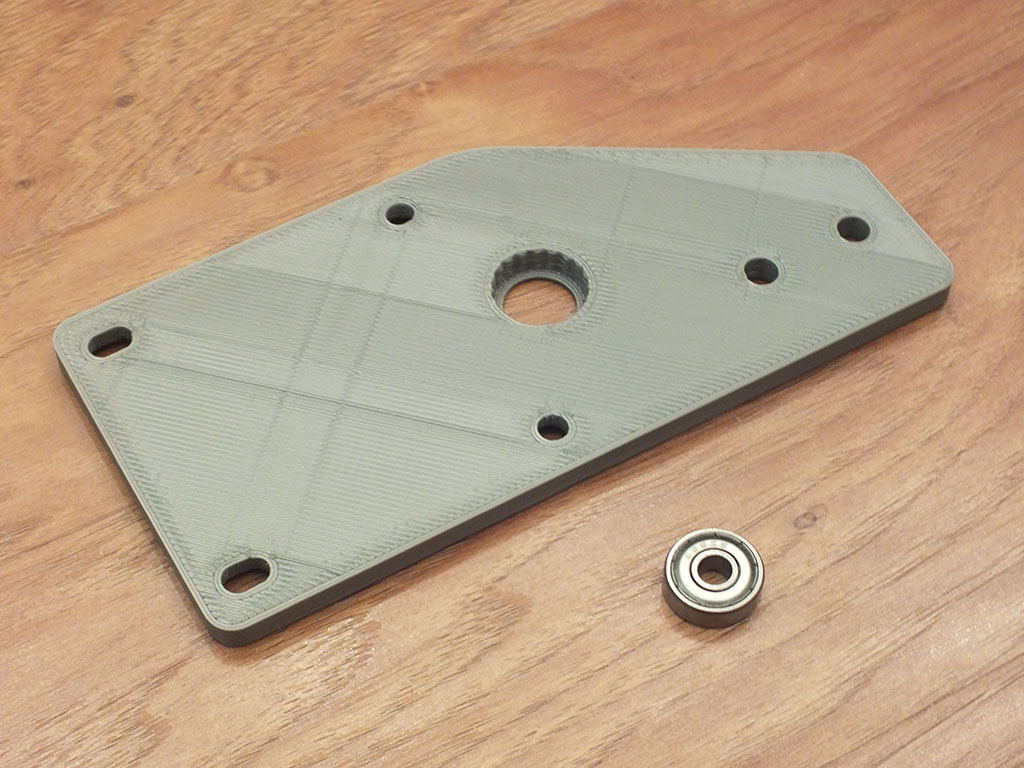
Я постарался исключить операцию склеивания. Для этого «пустил волну» по поверхности отверстия для установки подшипника. По этой причине необходимо с усилием вдавить подшипник.
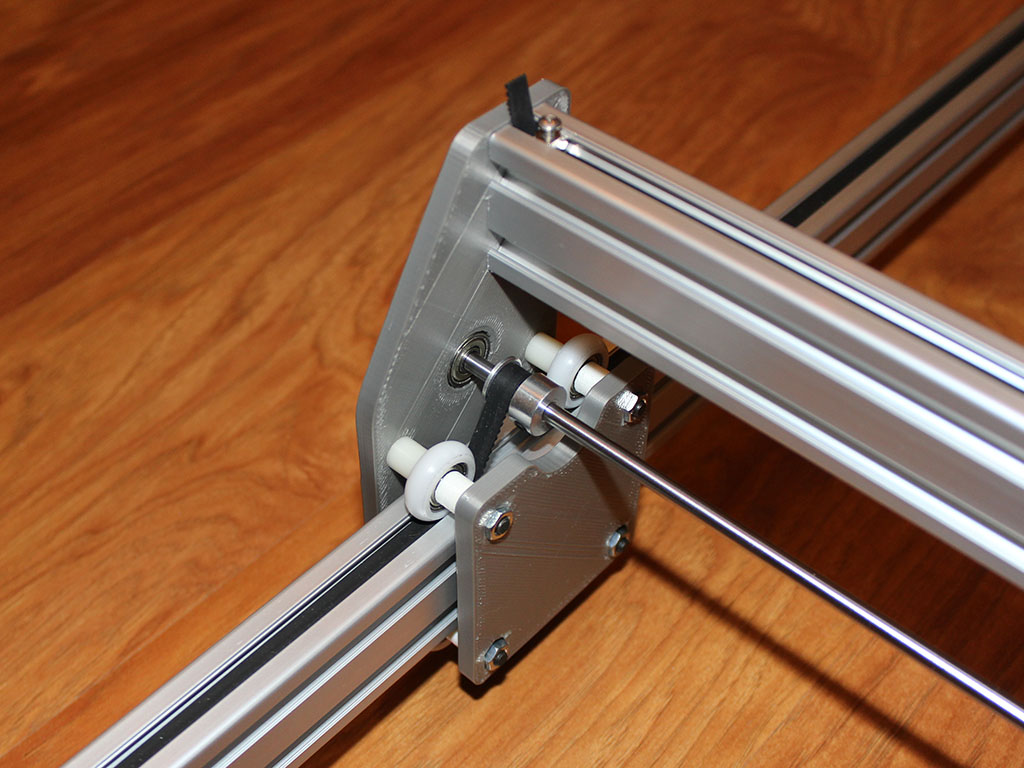
ШАГ 4. МОНТАЖ ЛЕВОЙ ПАНЕЛИ
Для монтажа потребуются следующие детали.

Сначала потребуется установить верхние ролики.

Затем установить сборку на профиль.

И закрепить нижние ролики. На рисунке хорошо видно, что крепежные отверстия винтов для крепления роликов имеют ход в несколько миллиметров. Это сделано для того, чтобы верхние и нижние ролики можно было хорошо стянуть на профиле, исключив люфт. Единственное, действовать потребуется аккуратно и не перетянуть. В этом случае шаговому двигателю потребуется излишнее усилие для перемещения панелей.

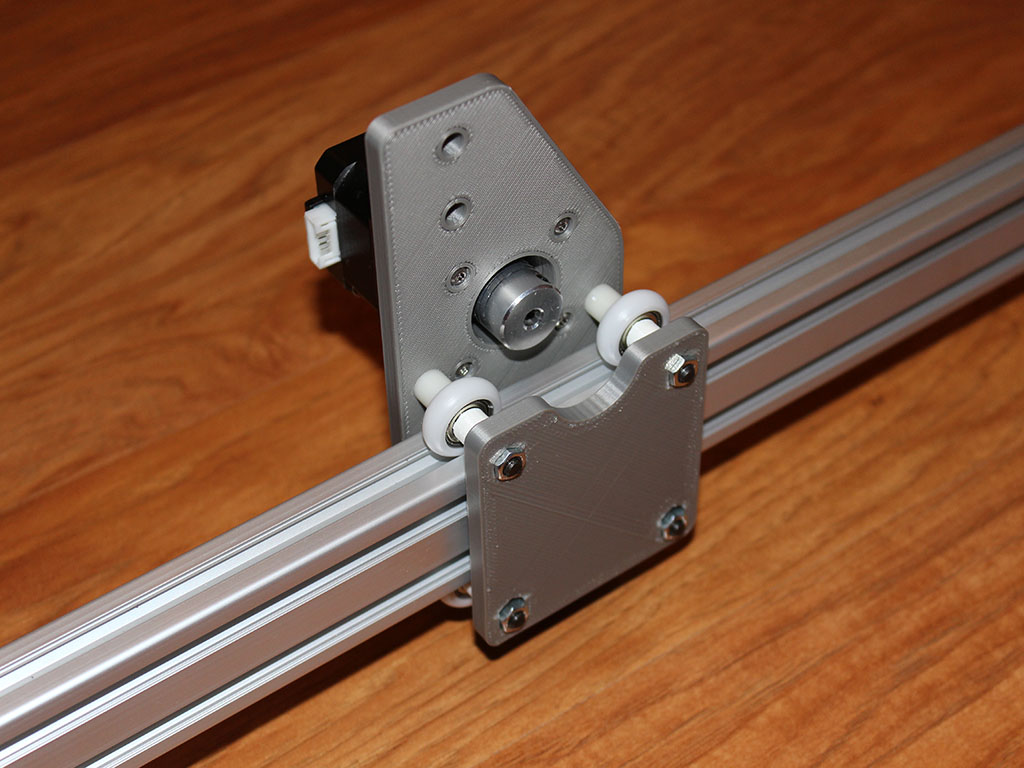
ШАГ 5. МОНТАЖ ПРАВОЙ ПАНЕЛИ
Для монтажа потребуются следующие детали.

Сначала потребуется установить верхние ролики.
Затем установить сборку на профиль и установить нижние ролики. Дальнейший монтаж идентичен монтажу левой панели.
После протягивания винтов потребуется проконтролировать ход панели. Она должна перемещаться достаточно легко и при этом отсутствовать люфт.
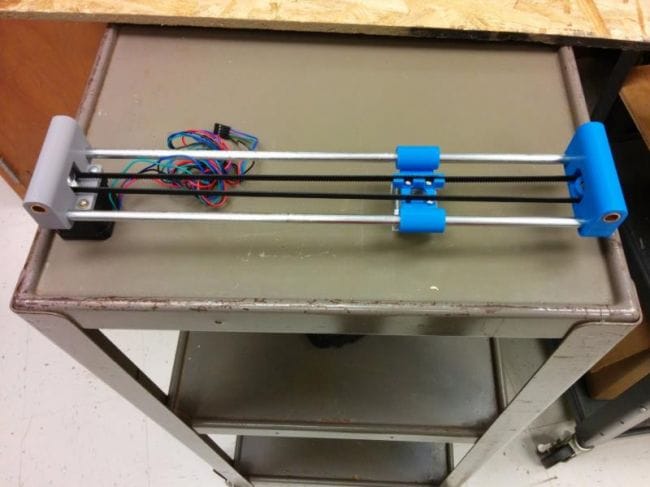
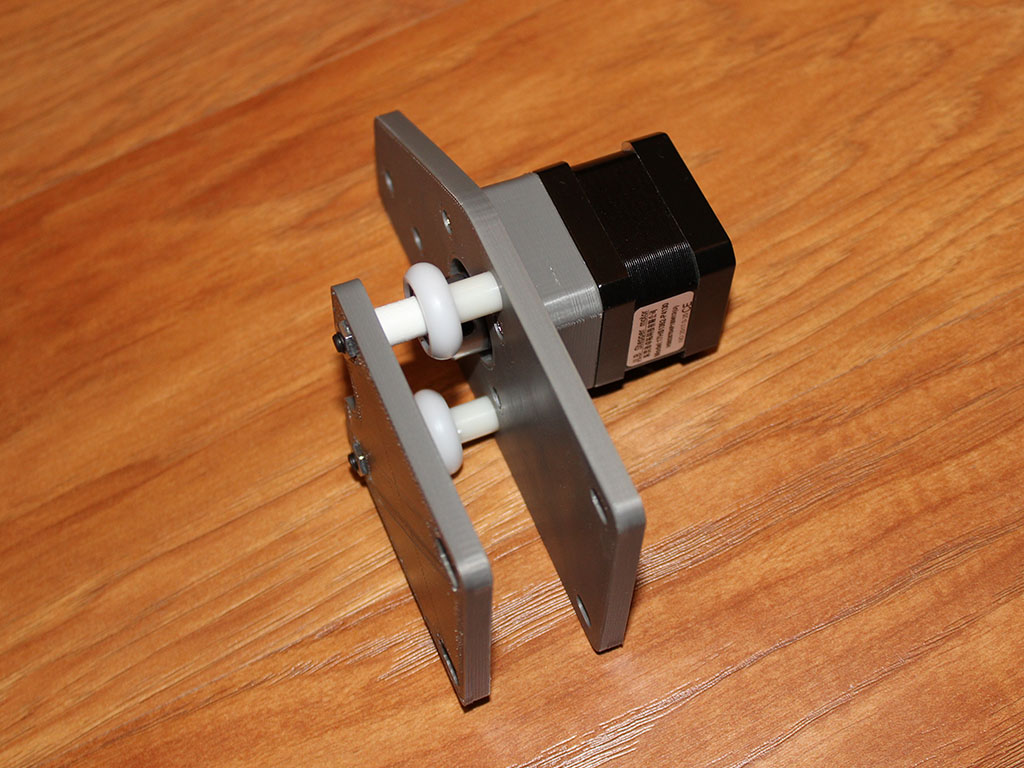
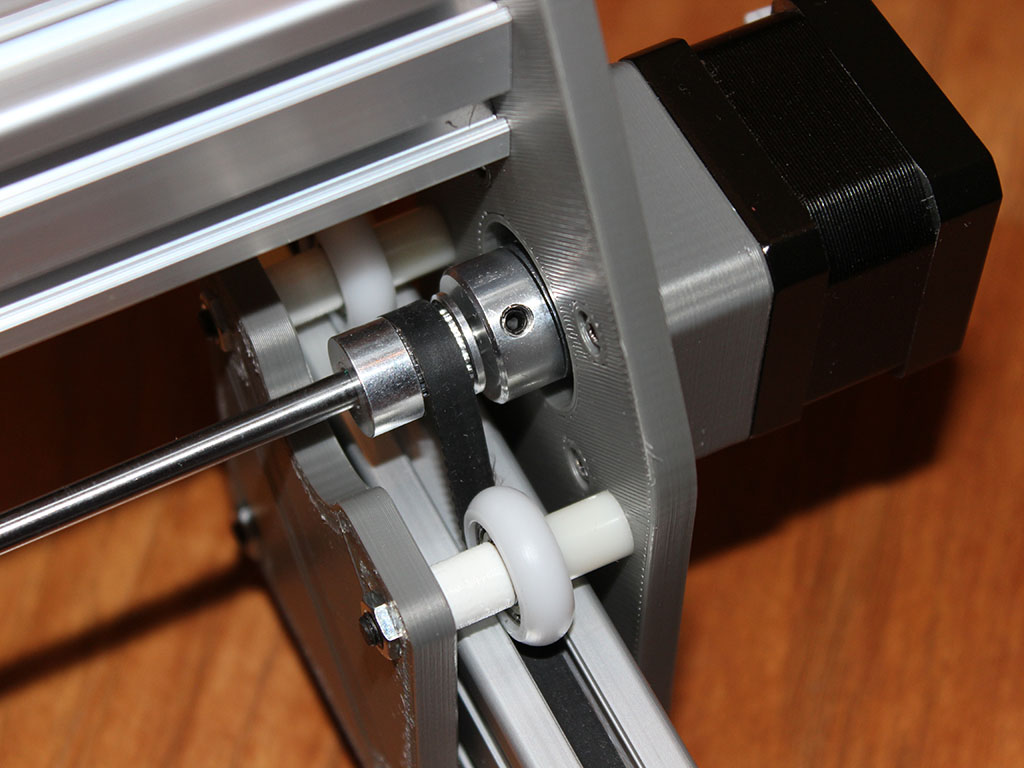
ШАГ 6. МОНТАЖ НАПРАВЛЯЮЩЕЙ КАРЕТКИ
Для передачи движения по оси Y в данной конструкции используются обе панели. Для того, чтобы не задействовать 2 шаговых двигателя, крутящий момент на левую панель передается через вал, диаметром 5мм. После подготовки деталей приступаем.

Сначала устанавливается связующий вал и зажимается стопорными винтами гибкой муфты.
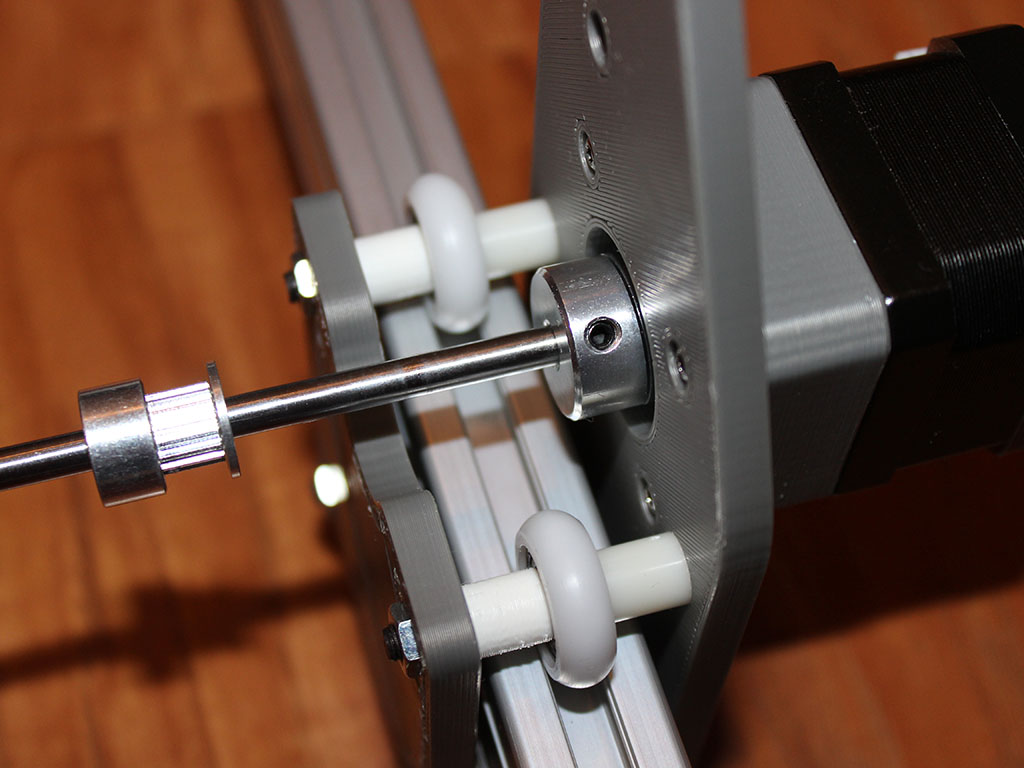
При установке необходимо проконтролировать, чтобы не были забыты шкивы. Жестко крепить их в данный момент нет необходимости. При натягивании ремней потребуется регулировка.

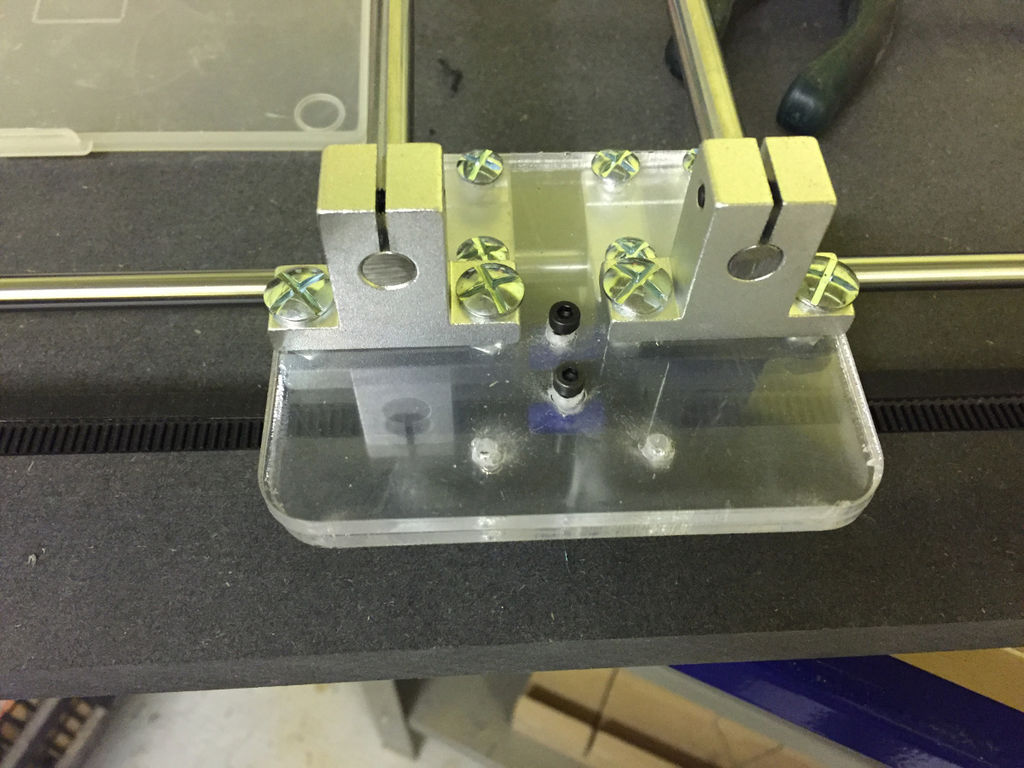
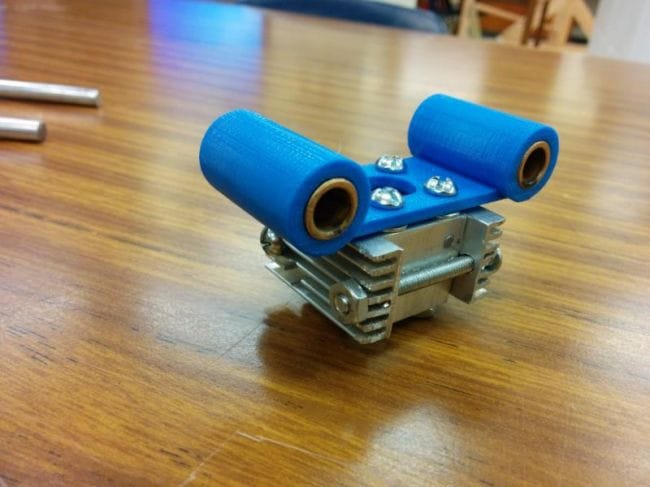
ШАГ 7. КАРЕТКА
Сборка каретки детально рассмотрена в предыдущей статье…
Сборка не представляет особого труда.

ШАГ 8. МОНТАЖ КАРЕТКИ НА НАПРАВЛЯЮЩУЮ
Для начала потребуется собрать все необходимые детали.

Все операции монтажа идентичны операциям монтажа панелей.
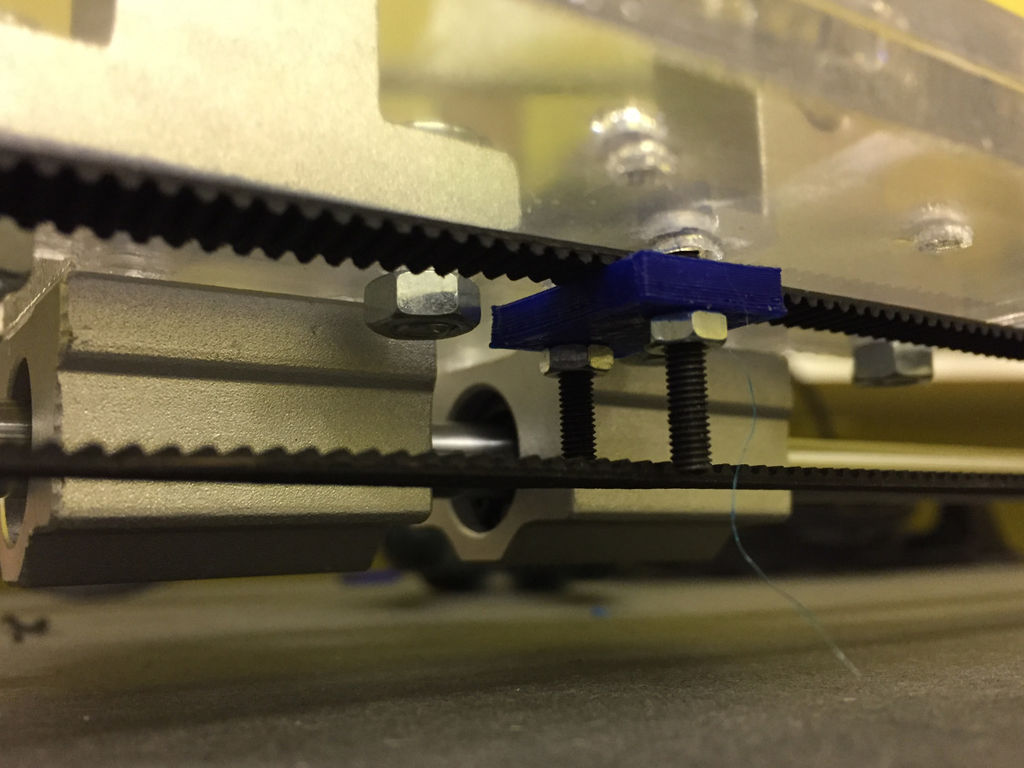
ШАГ 9. МОНТАЖ РЕМНЕЙ
Ремни притягиваются винтами под гайки профиля. Потребуется по-месту отрезать 3 ремня и подготовить крепеж.

Для начала край ремень располагается в нише профиля зубом вниз. После этого устанавливается гайка. Для установки гайки потребуется усилие.

Во время натягивания ремня потребуется выставить положение шкива. Шкив выставляется так, чтобы на всем ходу ремень как можно меньше притирался к боковым граням шкива.
Для установки ремня направляющей каретки лучше приподнять ее как показано на рисунке ниже, поскольку гайки все же лучше установить в нишу с торца.
После направляющая опускается на штатное место.

Перед затягиванием второго «хвоста» ремня необходимо убедиться, что ремень натянут достаточно сильно.
На этом сборка механики завершается.

КОНТРОЛЛЕР
Описание контроллеров для управления гравером я планирую подготовить в отдельной статье. Следите за публикациями!
НАБОР ДЛЯ СБОРКИ И ЛАЗЕРНЫЙ ГРАВЕР ПОД КЛЮЧ
С декабря 2017 принимаю заказы на полный набор для сборки и собранного, настроенного и полностью готового к использованию лазерного гравера, описанного в статье. Информация доступна в интернет-магазине.
Если Вам помогла статья и есть желание поддержать новые проекты, ссылка для поддержки:

Добавить комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.
Самодельный лазерный гравер на модуле D8-2500 и механике RepRap
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Статья относится к принтерам:
Самосборный лазерный гравер/резак на основе 2,5 Ваттного лазерного модуля.
Если коротко – XY-кинематика, прошивка Marlin и лазерный модуль D8–L2500. Гравер получился что надо —умеет и выжигать, как точками, так и линией, а самое главное — резать!
Подробности читайте далее…
Сразу напомню про ТБ: при работе с лазером используйте очки (специальные, с учетом длины волны лазера), не направляйте его в глаза. Лазер очень мощный — даже небольшое отраженное излучение может серьезно повредить сетчатку.

Итак, в последнее время я все бился над улучшением лазерного гравера Neje DK-5 с целью увеличения (в первую очередь) рабочей зоны и мощности для обработки различных материалов. В итоге, я пришел к тому, что проще сделать еще один, по образу китайских простеньких граверов на профиле.
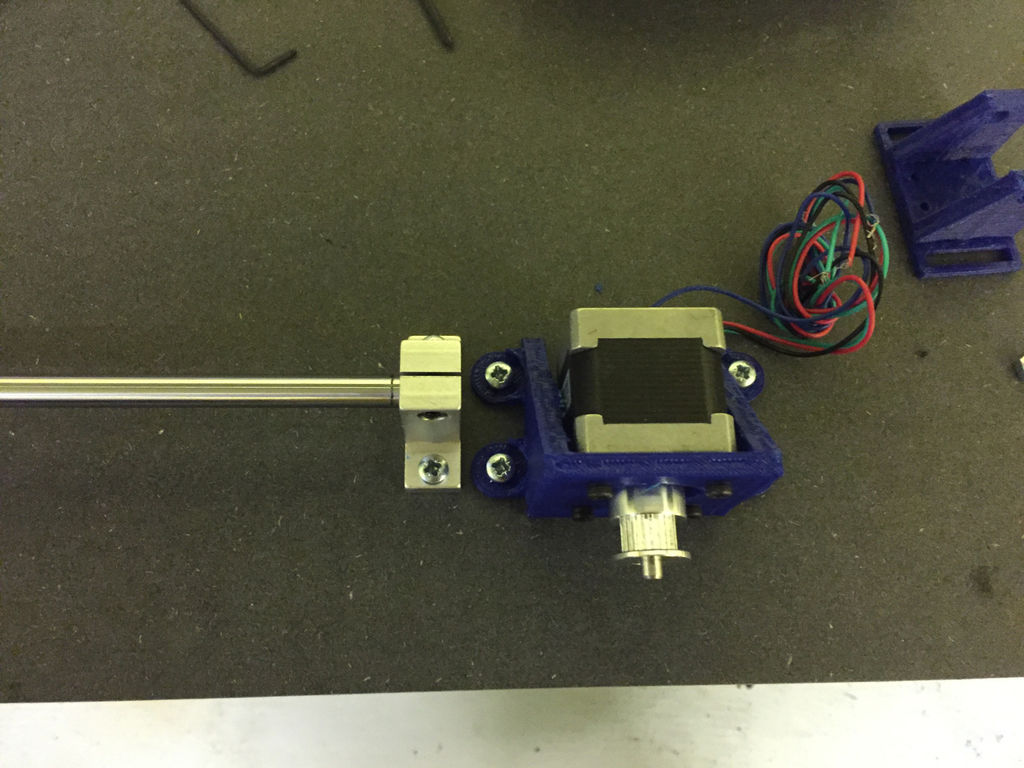
За основу я взял китайский комплект на алюминиевом конструкционном профиле 2020 и 2040. Забегая вперед, я скажу, что практика показала – проще делать все на одинаковом профиле 2040, так как значительно повышается удобство монтажа и жесткость рамы (на двойной профиль проще крепить элементы корпусных панелей, ножки, кабель-каналы).
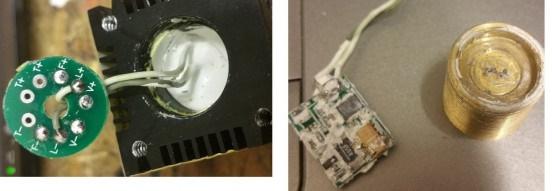
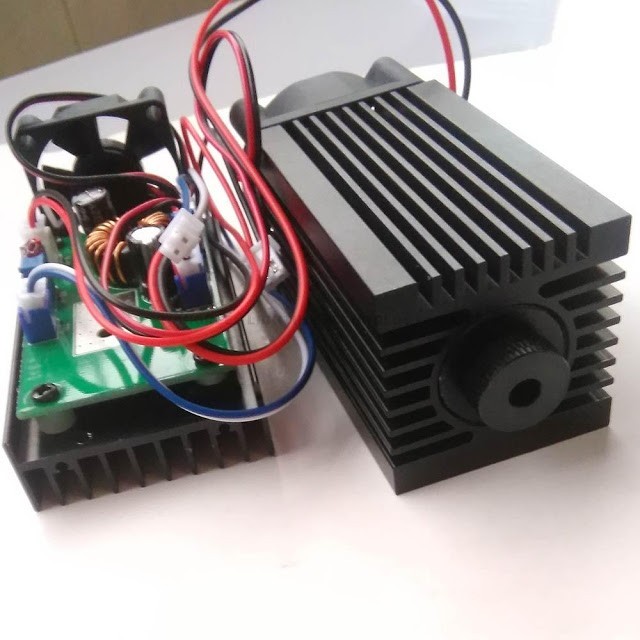
Основа любого лазерного гравера – это лазерный модуль. Опыт работы с диодами, выдранными из всевозможной техники, а также с модулем от Neje у меня был, но захотелось чего-то большего. У китайцев продаются твердотельные лазерные сборки все-в-одном: модуль в виде алюминиевого радиатора цилиндрической (реже) или прямоугольной формы (чаще всего). Внутри радиатора установлен цилиндрик с лазерным диодом, из которого торчат два контакта для подключения питающего тока. Также внутри лазерного модуля установлен (и залит некой субстанцией) токовый драйвер для диода, чаще всего СС (continuous current), реже – драйвер с поддержкой ТТЛ-сигналов для управления мощностью лазера. Часто – имеется вентилятор охлаждения сбоку или с торца радиатора. С другого торца на выходе лазера располагается фокусирующая или коллимирующая линза (в зависимости от назначения модуля). Питание, как правило, бывает 5В или 12В.
Вот пример того, что внутри (фото не мое, с просторов).
Лазерный твердотельные модули (диодные) бывают от сотен милливатт (например, от 0,3 Вт) до нескольких единиц (например, 5,5 китайских ватт). Чем больше мощность, тем выше цена, причем за мощные модули цена настолько высокая, что проще рассмотреть возможность установки трубки СО2, но это совсем другая история. Имейте ввиду, что китайские ватты не всегда соответствуют реальности (очень тяжело оценить реальную мощность излучения). И запросто можно купить один и тот же лазерный диод, промаркированный как 5,5W, так и 8W или 10W. Возможно, они будут отличаться завышенным током на сам диод, что сильно (в разы) сокращает время жизни диода.
Так как хотелось не только выжигать по дереву, но и резать что-либо (пластик, фанера, картон и т.п. – но не металлы!), то модуля от Neje мне уже не хватало, тем более выдранные из сидюков не катят, да и сгорают быстро. Было принято решение поискать и приобрести лазерный модуль на несколько ватт из Китая, в основном я выбирал из лазерных модулей на 450 нанометров (одни из самых доступных).
Существуют следующие разновидности лазерных головок на гирбесте:
Все лазеры на 445нм (фиолетовый лазер), с вентилятором охлаждения и блоком питания в комплекте.
Помимо отличия в мощности, очевидно, что отличается и питающее напряжение. Модули для 5В очень удобны для питания павербанками/батарейками, ну а также для готовых корпусов с приводами на 5В. Не забывайте, что вентилятор тоже должен быть на 5В.
При питании шаговых двигателей от 12В есть смысл приобрести и лазерный модуль на 12В с целью унификации питания гравера (то есть потребуется только 1 БП на 12В). Это как раз мой вариант. В комплекте с D8-2500 идет блок питания на 12В и 5А, что явно за глаза хватает лазерному диоду, и в придачу остается для питания электроники Ramps и сервоприводов.
В итоге я заказал 2,5Вт/12В. Вот что прислали:
Самодельный лазерный гравер. Другой подход к проектированию.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Всем доброго времени!
В этом посте хочу поделится с Вами процессом создания лазерного гравера на основе диодного лазера из Китая.
Несколько лет назад появилось желание приобрести себе готовый вариант гравера с Aliexpress с бюджетом в 15 тыс , но после долгих поисков я пришел к выводу, что все представленные варианты слишком простые и по сути являются игрушками. А хотелось что-то настольное и при этом достаточно серьезное. Спустя месяц исследований было принято решение сделать сей аппарат своими руками, и понеслась.
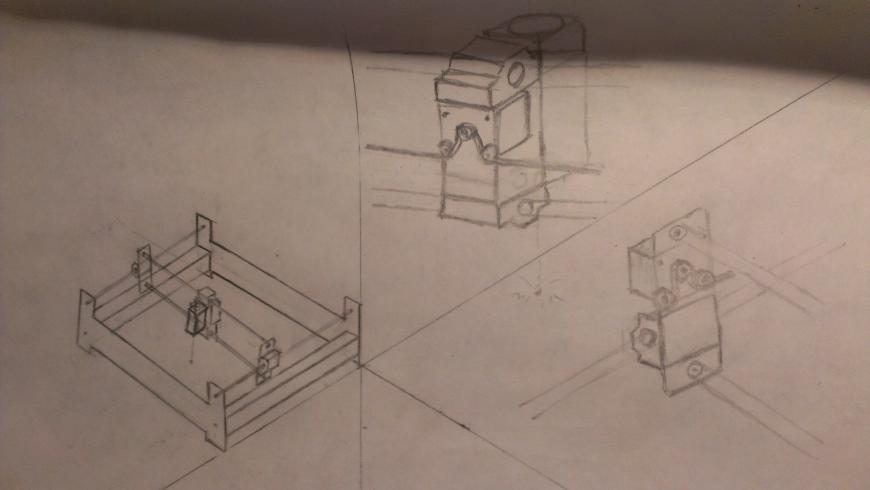
В тот момент у меня еще не было 3D принтера и опыта 3D моделирования, но зато с черчением все было в порядке)
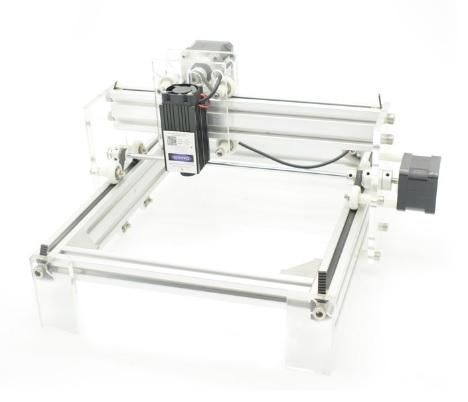
Вот собственно один из тех готовых граверов из Китая.
Насмотревшись на варианты возможных конструкций механики, на листочке были сделаны первые эскизы будущего станка..))
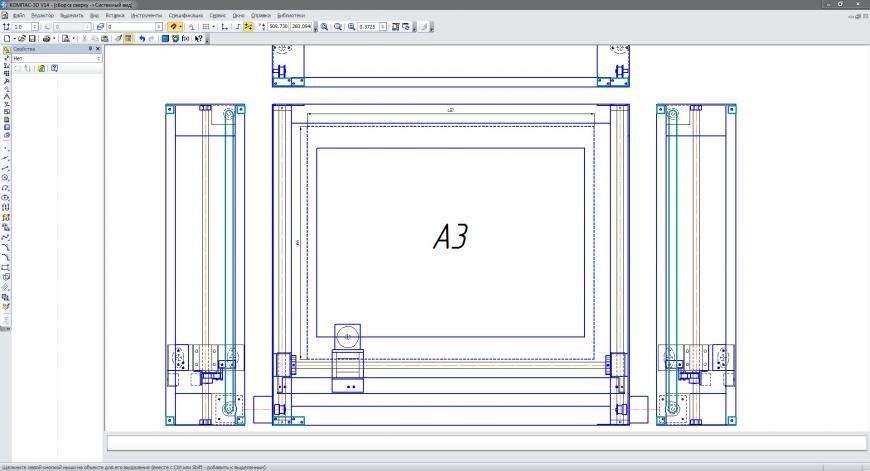
Было принято решение, что область гравировки должна быть не меньше листа А3.
Сам лазерный модуль был куплен одним из первых. Мощностью 2W, так как это было самым оптимальным вариантом за разумные деньги.
Вот собственно сам лазерный модуль.

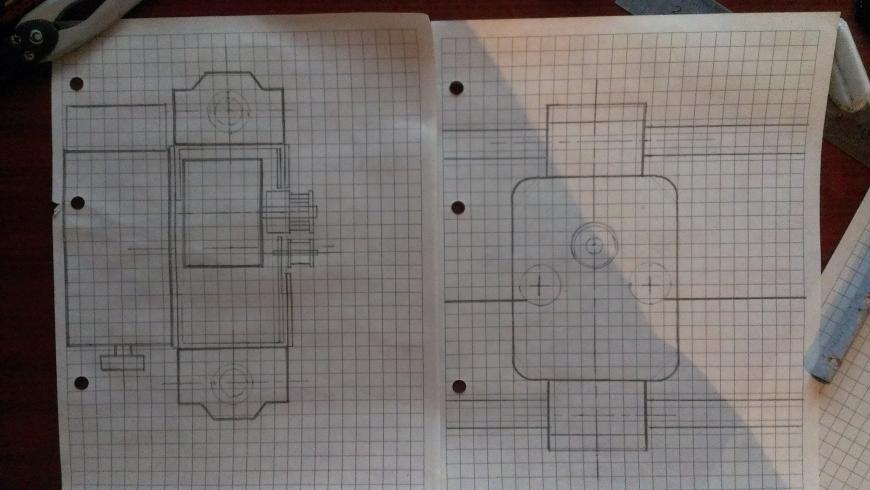
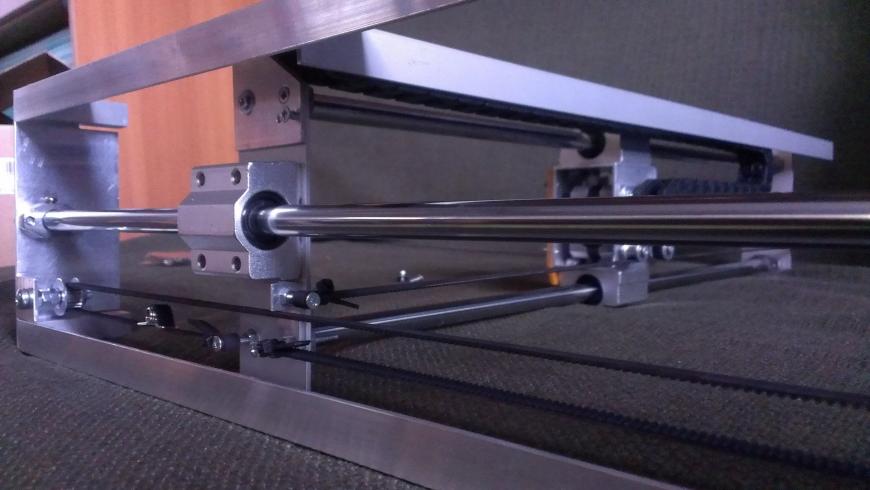
И так, было решено, что ось X будет ездить по оси Y и началось ее проектирование. А началось все с каретки.
Вся рама станка была сделана из алюминиевых профилей разной формы, купленных в Леруа.

Двигатели, линейные подшипники, ремни, валы и вся электроника заказывались с Aliexpress в процессе разработки и планы о том, как будут крепиться двигатели и какая будет плата управление менялись на ходу.
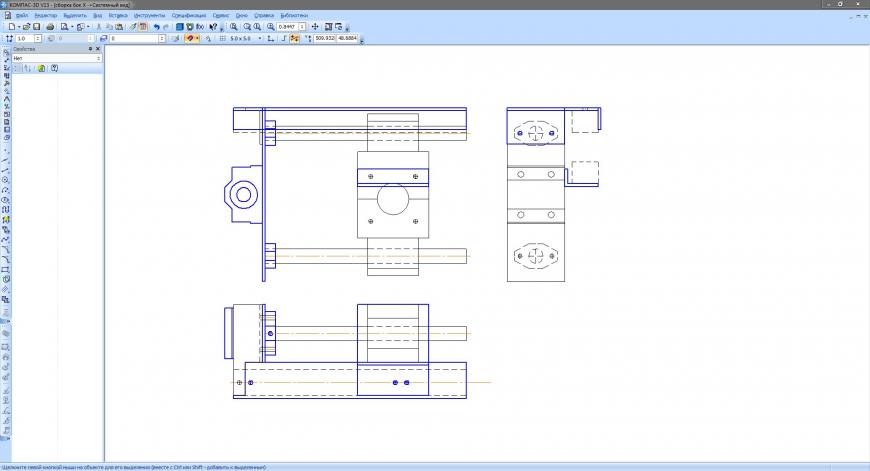
Спустя несколько дней черчения в Компасе был определен более менее четкий вариант конструкции станка.

А дальше. А дальше больше!
Боковины оси Y (извиняюсь за качество фото).
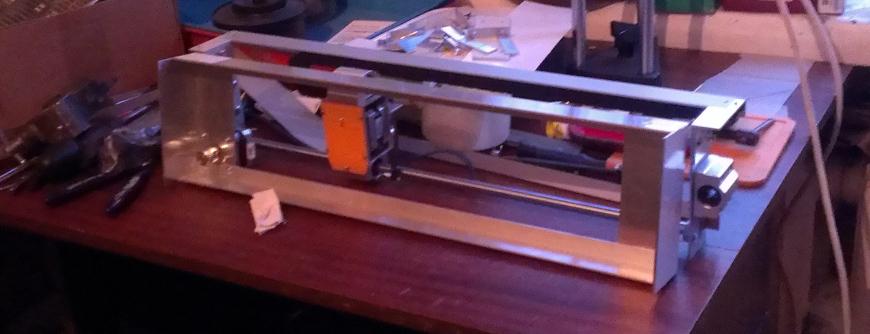
И это было только начало.
Дальше был корпус!
Была построена простенькая 3D модель общего вида станка, дабы уже точно определиться с его внешним видом и размерами.



И наконец, когда все было подогнано и последняя деталь была выкрашена в черный цвет 8) , наступила финишная прямая!
Теперь немного красивых фото))




И самое главное не забывать про технику безопасности.
Надевайте специальные защитные очки при работе с лазером!

Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Делаем лазерный резак/гравер формата А3 за один день
Всем привет, недавно наткнулся на замечательную работу по изготовлению лазерного резака от пользователя Jager, очень понравилось качество, аккуратность при изготовление станка и использованные идеи.
Решил с вами поделится.
(Далее будет копипаста, от имени автора).
Насмотревшись как жена мучается вырезая ножницами фигурки из фетра, решил облегчить ей задачу.
Пробежавшись по ссылкам гугла понял, самое оптимальное это кроить лазером.
У китайцев много разных готовых моделей, но все они так или иначе меня не устроили.
Быстро прикинул техзадание для себя:
1. Рабочее поле А3.
2. Станок должен быть потребительским. Положил материал, вставил флешку и дальше все должно делаться автоматически.
3. Простота конструкции (не так много свободного времени ).
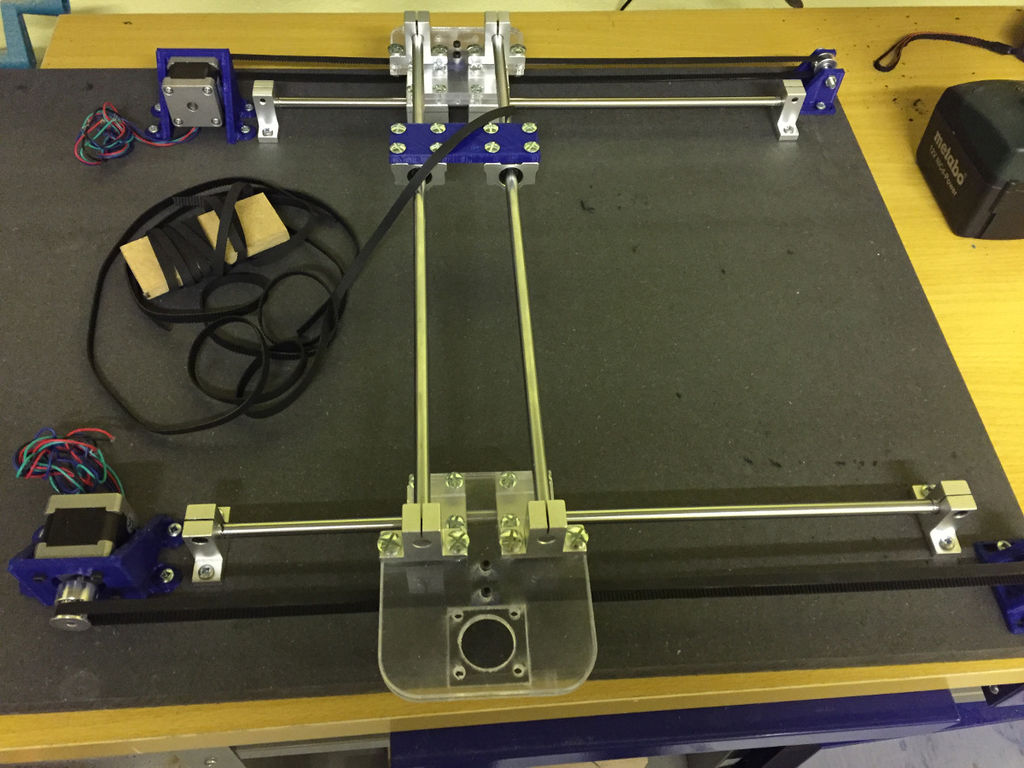
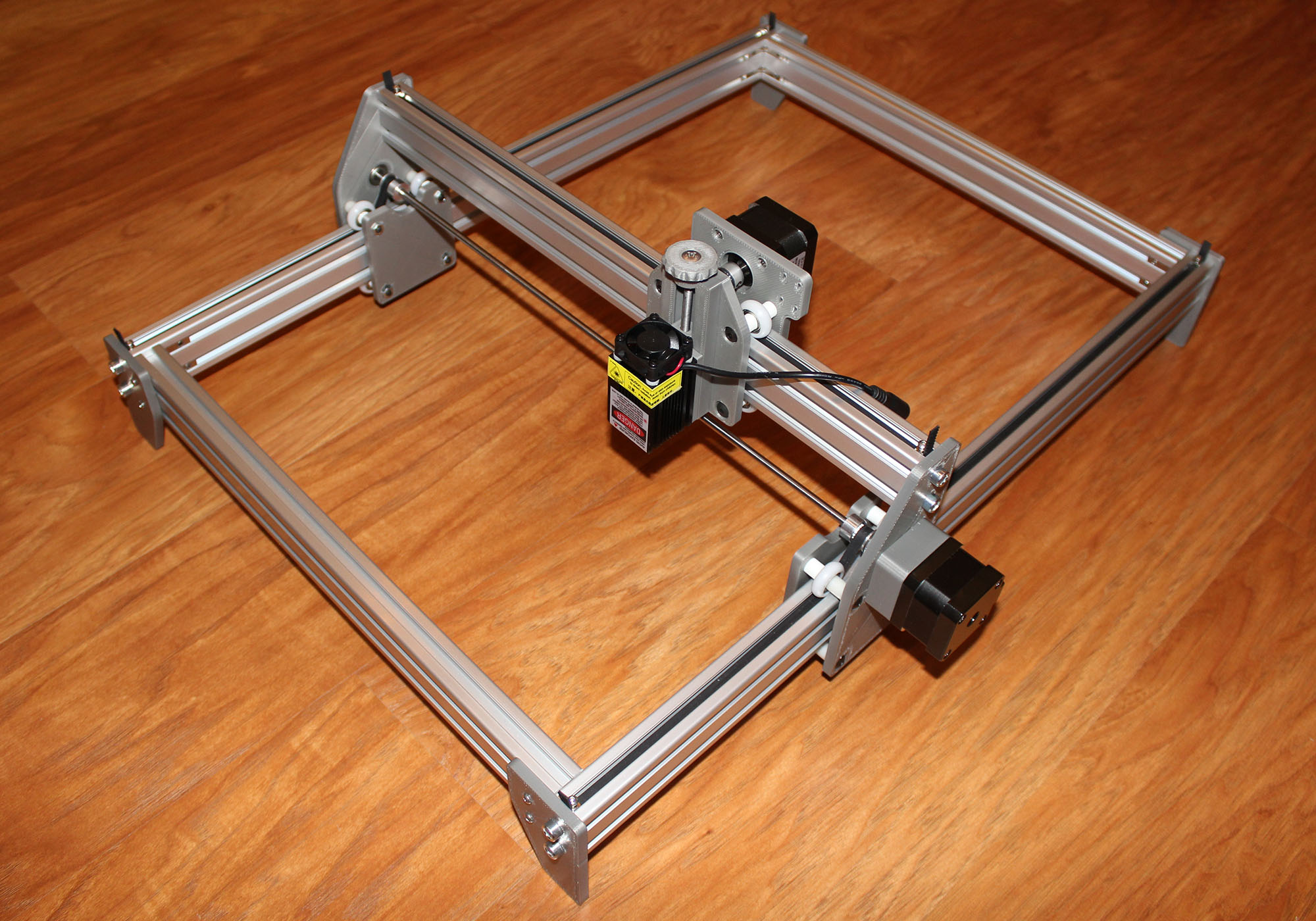
За основу механики взята китайская схема на конструкционном алюминиевом профиле и роликах.
Электронная часть собрана на готовых компонентах используемых в 3D принтерах.
Кроме профиля и метизов все заказывалось на алиэкспресс
Профиль оказалось проще и дешевле заказать в РФ. Заказ приняли, изготовили и отправили оперативно, все порезано аккуратно и в размер.
Пока заказанные комплектующие находились в пути, прикинул и нарисовал необходимые детали из оргстекла. На оси Y стойки толщиной 10 мм, на оси Х 5 мм.
В первой попавшейся компании занимающейся наружной рекламой мне все это вырезали за час, обошлось в 600 рублей вместе с материалом (на фото в защитной пленке).

В течении 20 дней все заказанное пришло и можно было начинать сборку.
Рама собирается просто, на картинках должно быть все понятно. Не стоит весь крепеж затягивать сразу намертво, это можно сделать после окончательной регулировки.



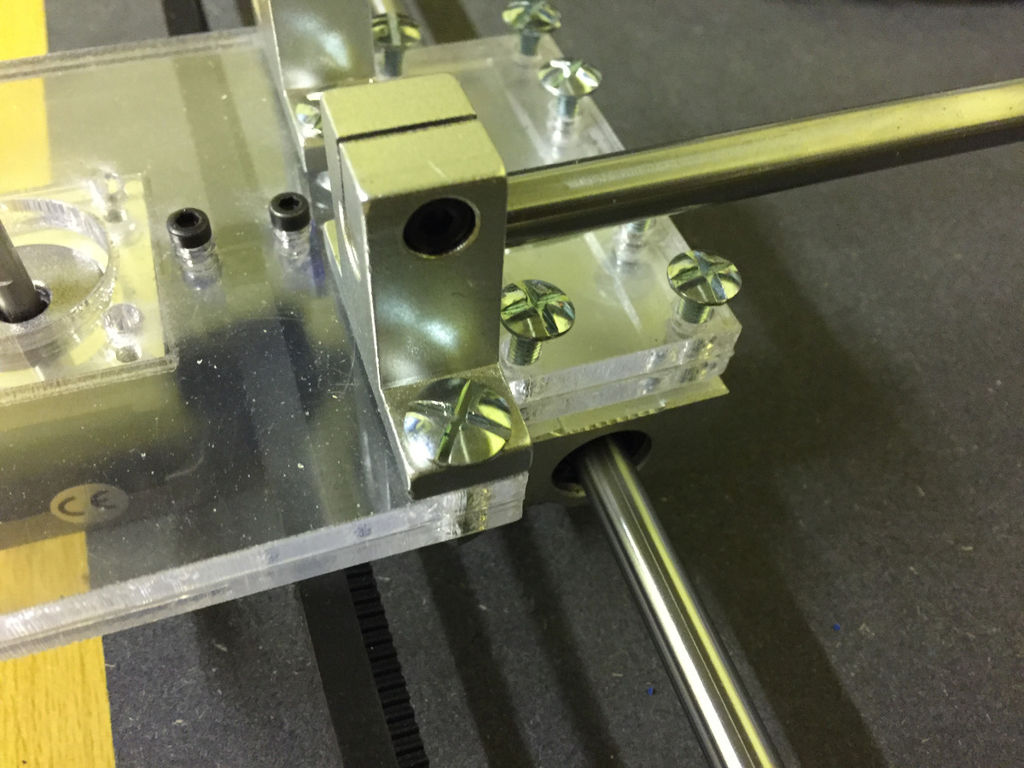
В деталях из оргстекла предусмотрены пазы для регулировки прижима нижними роликами. Верхние сразу фиксируем жестко, нижние затягиваем прижимая руками верхние и нижние ролики к профилю. Получившаяся тележка должна двигаться по профилю без люфта и лишних усилий.
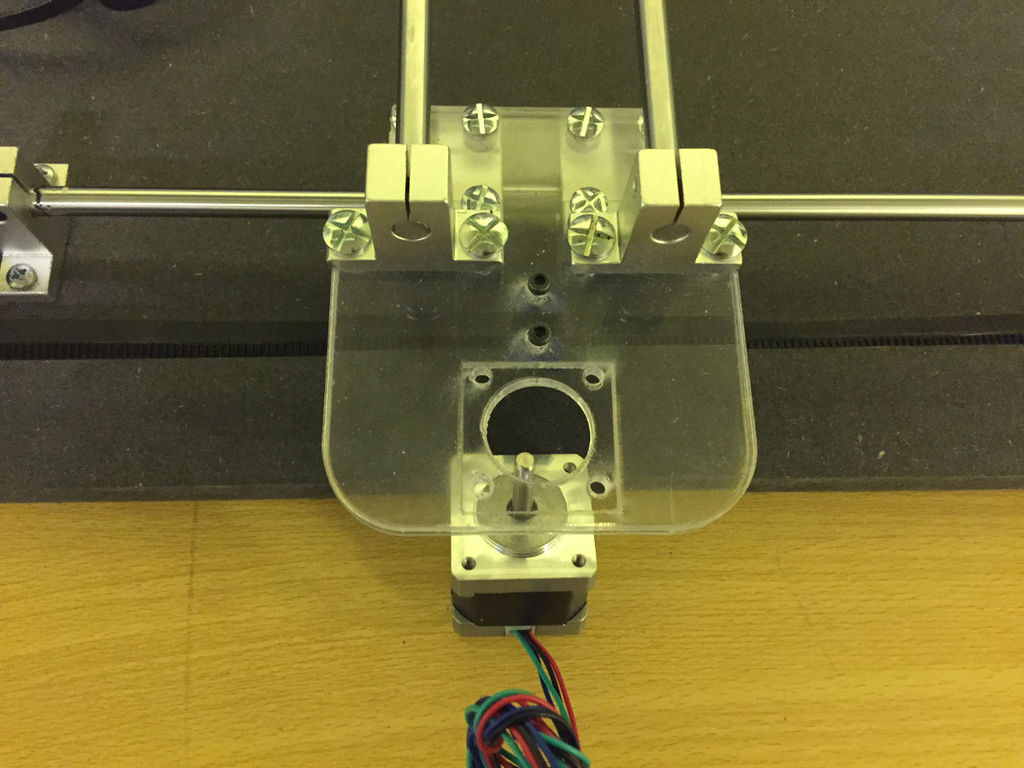
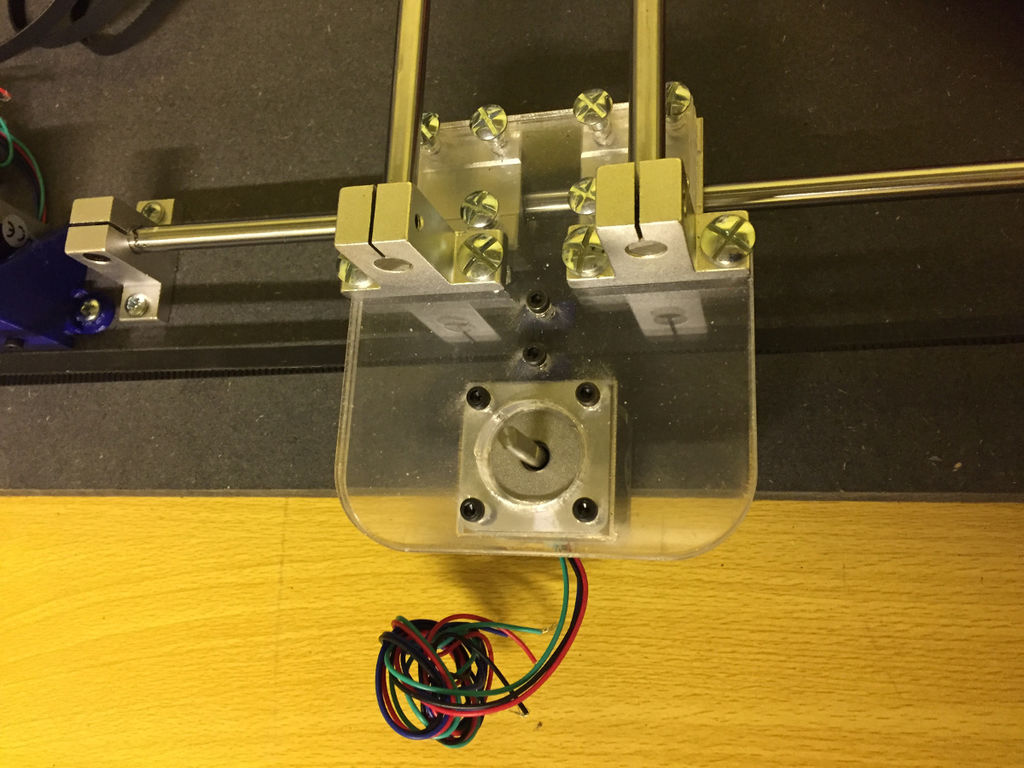
Двигатели NEMA17 с 400 шагами на оборот, работают мягко и тихо. На оси Y 2шт., поключенные к одному драйверу последовательно, на оси Х один.

После сборки убеждаемся что все двигается руками мягко и без заеданий. После этого ослабляем силовые уголки на основной раме что бы снять все возможные напряжения появившиеся от неизбежных перекосов и тут же все затягиваем обратно. Еще раз убеждаемся в плавности движения и отсутствии люфтов.
Можно переходить к электронной части. Самое главное это конечно сам лазер, в моем случае это синий лазер с длиной волны 445нМ и мощностью 2 Вт, в комплекте с драйвером.
Драйвер позволят с помощью ШИМ управлять мощностью излучения.
К сожалению большинство лазеров на али не имеют заводской маркировки вообще и очень часто продавцы завышают мощность в 2 раза легко. В моем случае продавец повел себя уверенно и согласился на мои условия в случае проблем с качеством или мощностью.
Косвенно на мощность указывает потребляемый ток, но я больше ориентировался на видео где показана работа аналогичных по мощности лазеров от известных производителей. Кстати в известном обзоре мощность лазера явно не 2,5Вт.
В общем работой лазера я удовлетворен, более того в переписке с продавцом выяснилось что мощность можно поднять до 2,5Вт без деградации кристалла, «just as you are a professional customer, also you can adjust the laser from 1.8-2.5W by yourself.»
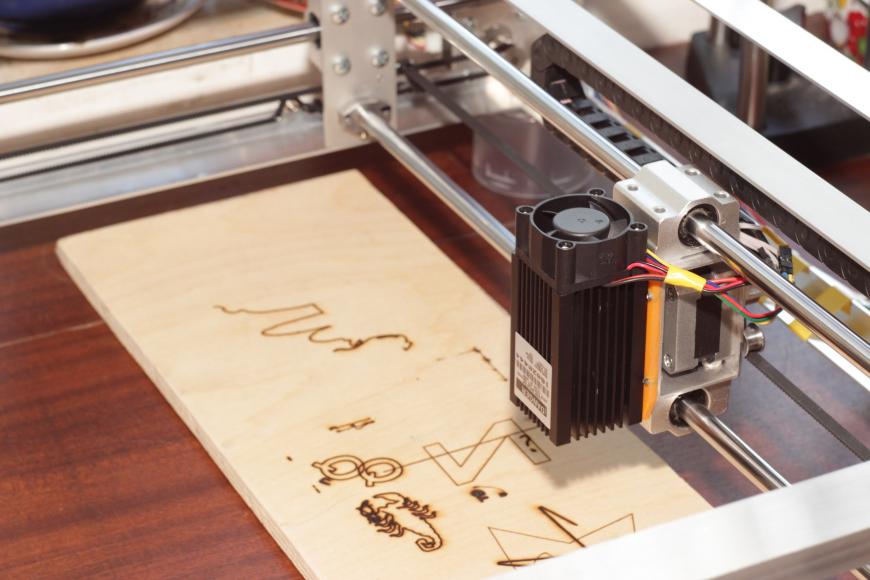
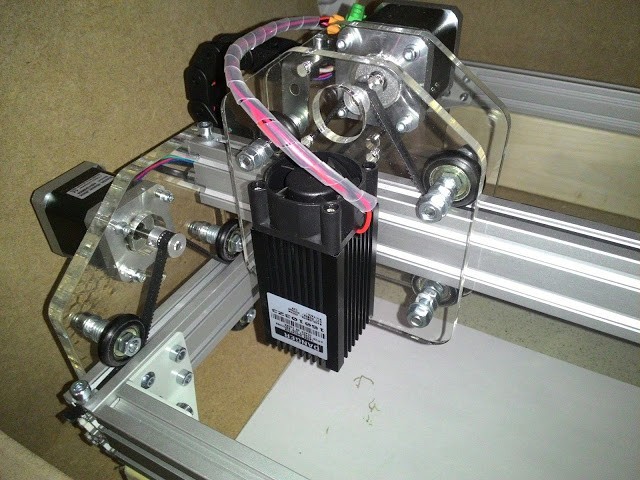
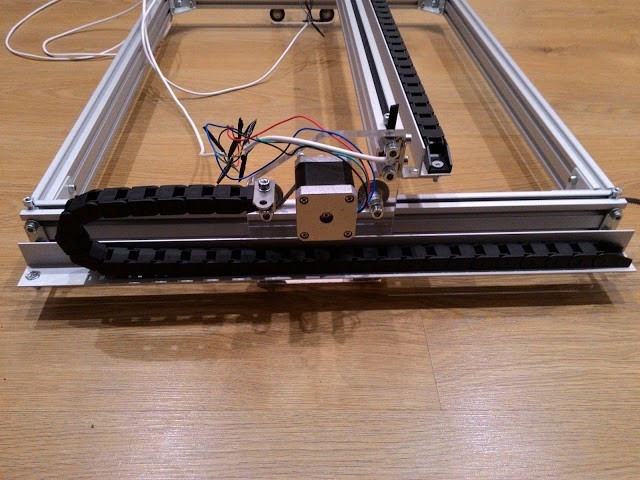
Установленный на свое место лазер

Данная прошивка настроена на управление лазером СО2 через выход на вентилятор и на нем присутствует 12 вольт. Прямое подключение моего драйвера сразу вывело бы его из строя, так как входной уровень TTL на нем 5 вольт.
Пришлось немного подредактировать прошивку, переместив выход управления лазером на 5 пин.
Активировал автозапуск при появлении карты в картридере, выставил рабочее поле и остальное по мелочи.
После заливки прошивки нужно настроить ток шаговых двигателей, для этого в принципе достаточно тонкой отвертки и пальца на радиаторе драйвера. После включения двигатели встают на удержание и вращением подстроечного резистора на драйвере добиваемся что бы радиатор был горячим, но не обжигающим кожу.
Файлы для управляющей программы удобно готовить с помощью Inkscape и вот этого плагина. http://jtechphotonics.com/?page_id=2012
На этом обзор можно и завершить, на этой стадии уже можно что то начать резать или гравировать, но лучше потратить еще немного сил и времени что бы привести все это в более менее нормальный вид.
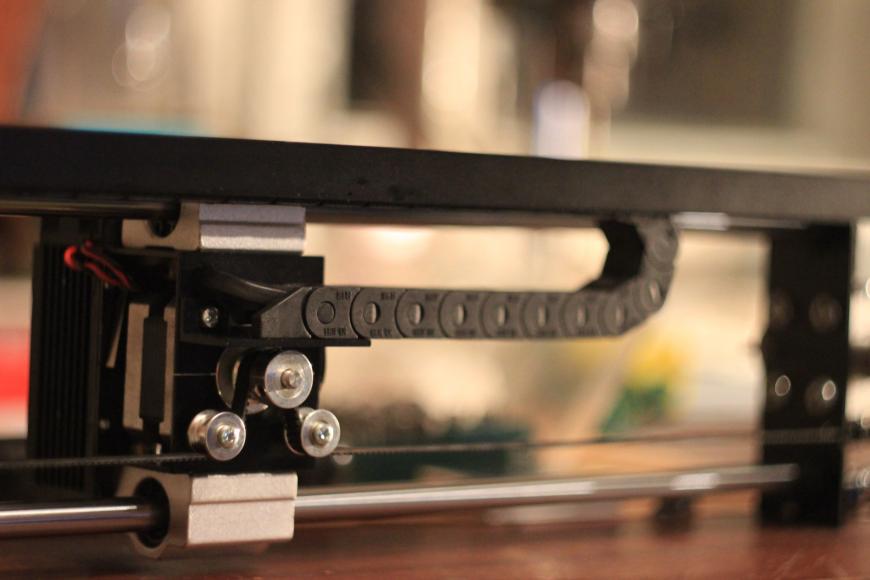
В первую очередь нужно убрать болтающиеся провода, для этого лучше всего использовать гибкий кабельный канал.
Конструкция видна на фото достаточно хорошо.

Алюминиевый уголок из леруа крепится на мебельные уголки оттуда же.
Все проводные соединения пропаиваем и прячем в термоусадку.
Для удобства работы нужно установить концевые выключатели, можно ограничится двумя, но лучше на оба крайних положения осей.

Крепление придумываем по месту, мне попались очень мелкие кнопки и оказалось что их проще всего приклеить к площадке из оргстекла.
а уже ее закрепить в удобном месте

В процессе работы лазера выделяются вредные вещества и их необходимо удалять из помещения, для этого нужен корпус и система вентиляции.
По объявлению нашел фирму изготавливающую корпусную мебель и по почте отправил чертеж, через 2 дня забрал готовый корпус, обошелся в 2000 рублей.